dsp.DCBlocker
阻断输入信号中的 DC 分量(偏移量)
描述
dsp.DCBlocker System object™ 从输入信号的每个通道(列)中删除 DC 偏移量。该操作随时间运行以不断估计和消除 DC 偏移量。
要阻断输入信号的 DC 分量,请执行以下操作:
创建
dsp.DCBlocker对象并设置其属性。用参量调用高对象,就像它是函数一样。
要了解 System object 工作原理的更多信息,请参阅什么是 System object?
该对象在特定条件下支持 C/C++ 代码生成和 SIMD 代码生成。有关详细信息,请参阅代码生成。
创建对象
描述
dcblker = dsp.DCBlockerdcblker,以阻断来自输入信号的每个通道(列)的 DC 分量。
dcblker = dsp.DCBlocker(PropertyName=Value)NormalizedBandwidth 设置为 0.004。
属性
对象函数
要使用对象函数,请将 System object 指定为第一个输入参量。例如,要释放名为 obj 的 System object 的系统资源,请使用以下语法:
release(obj)
示例
使用 IIR、FIR 和减去均值估计算法去除输入信号的 DC 分量。
创建一个由 15 Hz 音调、25 Hz 音调和 DC 偏移量组成的信号。
t = (0:0.001:100)'; x = sin(30*pi*t) + 0.33*cos(50*pi*t) + 1;
为三种估计算法创建三个 DC blocker 对象。
dc1 = dsp.DCBlocker(Algorithm="IIR",Order=6); dc2 = dsp.DCBlocker(Algorithm="FIR",Length=100); dc3 = dsp.DCBlocker(Algorithm="Subtract mean");
对于每一秒时间,都让输入信号通过 DC 阻隔器。通过以 1 秒为增量实现 DC blocker,您可以观察到收敛时间的差异。
for idx = 1 : 100 range = (1:1000) + 1000*(idx-1); y1 = dc1(x(range)); % IIR estimate y2 = dc2(x(range)); % FIR estimate y3 = dc3(x(range)); % Subtract mean end
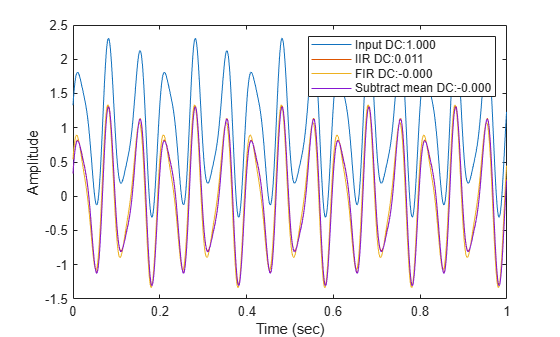
绘制第一秒内三个 DC blocker 的输入和输出数据,并显示每个信号的均值。三种算法类型的均值表明 FIR 和 Subtract mean 算法收敛得更快。
plot(t(1:1000),x(1:1000), ... t(1:1000),y1, ... t(1:1000),y2, ... t(1:1000),y3); xlabel("Time (sec)") ylabel("Amplitude") legend(sprintf("Input DC:%.3f",mean(x)), ... sprintf("IIR DC:%.3f",mean(y1)), ... sprintf("FIR DC:%.3f",mean(y2)), ... sprintf("Subtract mean DC:%.3f",mean(y3)));
将具有 DC 偏移量的输入信号的频谱与应用 DC blocker 后的同一信号的频谱进行比较。启用 DC blocker 以使用 FIR 估计算法。
创建一个由三个音调组成的输入信号,其 DC 偏移量为 1。将采样频率设置为 1 kHz,并将信号持续时间设置为 100 秒。
fs = 1000; t = (0:1/fs:100)'; x = sin(30*pi*t) + 0.67*sin(40*pi*t) + 0.33*sin(50*pi*t) + 1;
创建一个 DC blocker 对象,它使用 FIR 算法来估计 DC 偏移量。
dcblker = dsp.DCBlocker(Algorithm="FIR",Length=100);
创建一个频谱分析仪,其功率单位设置为 dBW,频率范围设置为 [-30 30],以显示输入信号的频率响应。使用 clone 函数创建第二个频谱分析仪来显示输出的响应。然后,使用频谱分析仪的 Title 属性来标记它们。
hsa = spectrumAnalyzer(SampleRate=fs, ... Method="welch",... AveragingMethod="exponential",... SpectrumUnits="dBW",FrequencySpan="start-and-stop-frequencies",... StartFrequency=-30,StopFrequency=30,YLimits=[-200 20],... Title="Signal Spectrum"); hsb = clone(hsa); hsb.Title = "Signal Spectrum After DC Blocker";
让输入信号 x 通过 DC blocker 以生成输出信号 y。
y = dcblker(x);
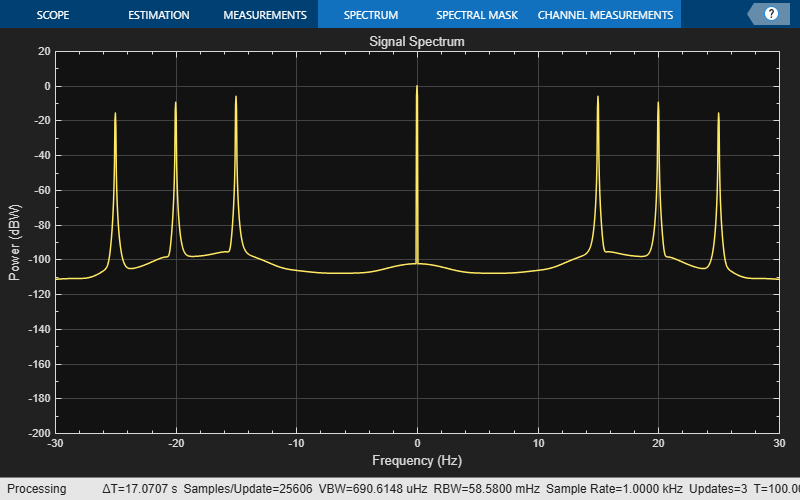
使用第一个频谱分析仪以显示输入信号的频率特征。15、20 和 25 Hz 的音调以及 DC 分量清晰可见。
hsa(x)
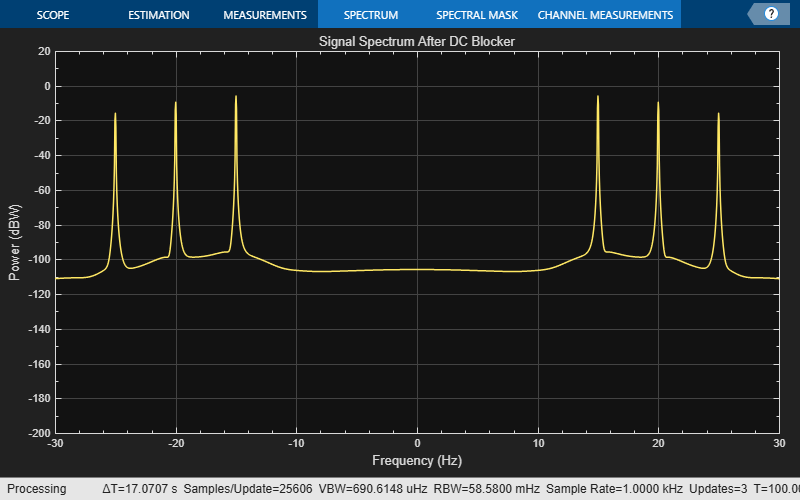
使用第二个频谱分析仪显示输出信号的频率特征。DC 分量已删除。
hsb(y)
算法
参考
[1] Nezami, M. “Performance Assessment of Baseband Algorithms for Direct Conversion Tactical Software Defined Receivers: I/Q Imbalance Correction, Image Rejection, DC Removal, and Channelization.” MILCOM, 2002.