simulate
Simulate posterior draws of Bayesian nonlinear non-Gaussian state-space model parameters
Since R2024b
Syntax
Description
[
returns 1000 random vectors of state-space model parameters Params,accept] = simulate(PriorMdl,Y,params0,Proposal)Params drawn
from the posterior distribution
Π(θ|Y), where
PriorMdl specifies the prior distribution and data likelihood, and
Y is the observed response data. params0 is the
set of initial parameter values and Proposal is the covariance matrix
of the proposal distribution of the Metropolis-Hastings (MH) sampler [9][10] within the Markov chain Monte Carlo
(MCMC) sampler. accept is the acceptance rate of the proposal
draws.
[
specifies options using one or more name-value arguments. For example,
Params,accept] = simulate(PriorMdl,Y,params0,Proposal,Name=Value)simulate(PriorMdl,Y,params0,Proposal,NumDraws=1e3,Thin=4,DoF=10) uses
the multivariate t10 distribution for the MH
proposal, draws 4e3 random vectors of parameters, and thins the sample to
reduce serial correlation by discarding every 3 draws until it retains
1e3 draws.
[
also returns the output Params,accept,Output] = simulate(PriorMdl,Y,params0,Proposal,Name=Value)Output of the custom function that monitors the
MCMC sampler at each iteration, specified by the OutputFunction
name-value argument.
Examples
This example implements an MCMC sampler to random draw parameters from the posterior distribution of the Bayesian nonlinear state-space model in equation. The example uses simulated data.
where the parameters in have the following priors:
, that is, a truncated normal distribution with .
, that is, an inverse gamma distribution with shape and scale .
, that is, a gamma distribution with shape and scale .
To simulate values from posterior distribution, the simulate function requires response data, a bnlssm object that specifies the prior distribution and identifies which parameters to fit to the data, initial values for the parameters, and optionally but a best practice is to provide a carefully tuned proposal distribution moments.
Simulate Series
Consider this data-generating process (DGP).
where the series is a standard Gaussian series of random variables.
Simulate a series of 200 observations from the process.
rng(1,"twister") % For reproducibility T = 200; thetaDGP = [0.7; 0.2; 3]; numparams = numel(thetaDGP); MdlXSim = arima(AR=thetaDGP(1),Variance=thetaDGP(2), ... Constant=0); xsim = simulate(MdlXSim,T); y = random("poisson",thetaDGP(3)*exp(xsim)); figure plot(y)
Create Bayesian Nonlinear Prior Model
A prior distribution is required to compose a posterior distribution. The Local Functions section contains the functions paramMap and priorDistribution required to specify the Bayesian nonlinear state-space model. The paramMap function specifies the state-space model structure and initial state moments. The priorDistribution function returns the log of the joint prior distribution of the state-space model parameters. You can use the functions only within this script.
Create a Bayesian nonlinear state-space model for the DGP.
Arbitrarily choose values for the hyperparameters.
Indicate that the state-space model observation equation is expressed as a distribution.
To speed up computations, the arguments
AandLogYof theparamMapfunction are written to enable simultaneous evaluation of the transition and observation densities of multiple particles. Specify this characteristic by using theMultipointname-value argument.
% pi(phi,sigma2) hyperparameters m0 = 0; v02 = 1; a0 = 1; b0 = 1; % pi(lambda) hyperparameters alpha0 = 3; beta0 = 1; hyperparams = [m0 v02 a0 b0 alpha0 beta0]; PriorMdl = bnlssm(@paramMap,@(x)priorDistribution(x,hyperparams), ... ObservationForm="distribution",Multipoint=["A" "LogY"]);
PriorMdl is a bnlssm model specifying the state-space model structure and prior distribution of the state-space model parameters. Because PriorMdl contains unknown values, it serves as a template for posterior simulation with observations.
Choose Initial Parameter Values
Arbitrarily choose a set of initial parameter for the MCMC sampler.
theta0 = [0.5; 0.1; 2];
Tune Proposal Distribution
Obtain optimal proposal distribution moments by passing the prior model, data, and initial parameter values to the tune function.
[params,Proposal] = tune(PriorMdl,y,theta0);
Optimization and Tuning
| Params0 Optimized ProposalStd
----------------------------------------
c(1) | 0.5000 0.6081 0.1584
c(2) | 0.1000 0.2190 0.0896
c(3) | 2 2.8497 0.2166
params and Proposal are the optimized mean and covariance of the Gaussian proposal distribution for the MH sampler used by simulate.
Draw From Posterior Distribution
Simulate the posterior by passing the prior model, simulated data, and optimized proposal moments initial to simulate. Return the draws and the acceptance rate of the MH proposal draws.
[ThetaPostDraws,accept] = simulate(PriorMdl,y,params,Proposal); [numParams,numDraws] = size(ThetaPostDraws)
numParams = 3
numDraws = 1000
accept
accept = 0.3550
ThetaPostDraws is a 3-by-1000 matrix of random draws from the posterior distribution. By default, simulate treats the first 100 draws as a burn-in sample and excludes them in the results. The acceptance rate is about 42%, which means the MH step of the MCMC sampler retained 42% of the proposed draws from the proposal distribution to represent the posterior distribution.
To diagnose the MCMC sampler, create trace plots of the posterior parameter draws.
paramnames = ["\phi" "\sigma^2" "\lambda"]; figure h = tiledlayout(3,1); for j = 1:numParams nexttile plot(ThetaPostDraws(j,:)) hold on yline(thetaDGP(j)) ylabel(paramnames(j)) end title(h,"Posterior Trace Plots")
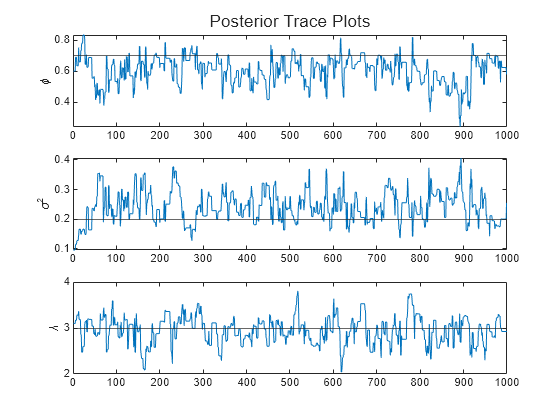
The sampler eventually settles at near the true values of the parameters. In this case, the sample shows serial correlation and transient behavior. You can remedy serial correlation in the sample by adjusting the Thin name-value argument, and you can remedy transient effects by increasing the burn-in period using the BurnIn name-value argument.
Local Functions
These functions specify the state-space model parameter mappings, in distribution form, and the log prior distribution of the parameters.
function [A,B,LogY,Mean0,Cov0,StateType] = paramMap(theta) A = theta(1); B = sqrt(theta(2)); LogY = @(y,x)y.*(x + log(theta(3)))- exp(x).*theta(3); Mean0 = 0; Cov0 = 2; StateType = 0; % Stationary state process end function logprior = priorDistribution(theta,hyperparams) % Prior of phi m0 = hyperparams(1); v20 = hyperparams(2); pphi = makedist("normal",mu=m0,sigma=sqrt(v20)); pphi = truncate(pphi,-1,1); lpphi = log(pdf(pphi,theta(1))); % Prior of sigma2 a0 = hyperparams(3); b0 = hyperparams(4); lpsigma2 = -a0*log(b0) - log(gamma(a0)) + (-a0-1)*log(theta(2)) - ... 1./(b0*theta(2)); % Prior of lambda alpha0 = hyperparams(5); beta0 = hyperparams(6); plambda = makedist("gamma",alpha0,beta0); lplambda = log(pdf(plambda,theta(3))); logprior = lpphi + lpsigma2 + lplambda; end
Consider the model in the example Draw Parameters From Posterior Distribution. Improve the Markov chain convergence by adjusting sampler options.
Create a Bayesian nonlinear state-space model (bnlssm) object that represents the DGP, and then simulate a response path.
rng(1,"twister") % For reproducibility T = 200; thetaDGP = [0.7; 0.2; 3]; numparams = numel(thetaDGP); MdlXSim = arima(AR=thetaDGP(1),Variance=thetaDGP(2), ... Constant=0); xsim = simulate(MdlXSim,T); y = random("poisson",thetaDGP(3)*exp(xsim));
Create the Bayesian nonlinear state-space model template for estimation by passing function handles directly to paramMap and paramDistribution to bnlssm (the functions are in Local Functions). Tune the proposal distribution; suppress the tuning algorithm's output.
m0 = 0; v02 = 1; a0 = 1; b0 = 1; alpha0 = 3; beta0 = 1; hyperparams = [m0 v02 a0 b0 alpha0 beta0]; PriorMdl = bnlssm(@paramMap,@(x)priorDistribution(x,hyperparams), ... ObservationForm="distribution",Multipoint=["A" "LogY"]); theta0 = [0.5; 0.1; 2]; [params,Proposal] = tune(PriorMdl,y,theta0,Display="off");
In Draw Parameters From Posterior Distribution:
The optimized proposal moments appear adequate. Therefore, you might not need to adjust the proposal tuning procedure.
The trace plots suggest that the Markov chain settles after 100 processed draws, and significant autocorrelation among the draws exists. Therefore, you should tune the MCMC sampler.
Adjust the sampler the following ways:
Because the default burn-in period is 100 draws, specify a burn-in period of 200 (
BurnIn=200).Specify thinning the sample by keeping the first draw of each set of 10 successive draws (
Thin=10).Retain 2000 random parameter vectors (
NumDraws=2000).Set the proposal scale proportionality constant to 0.25 to increase the sample acceptance rate.
Simulate from the posterior distribution. Specify the simulated response path as observed responses, an arbitrary set of initial parameter values to initialize the MCMC algorithm, and sampler adjustments.
[ThetaPostDraws,accept] = simulate(PriorMdl,y,params,Proposal,Burnin=200,Thin=10, ...
NumDraws=2000,Proportion=0.25);
acceptaccept = 0.6860
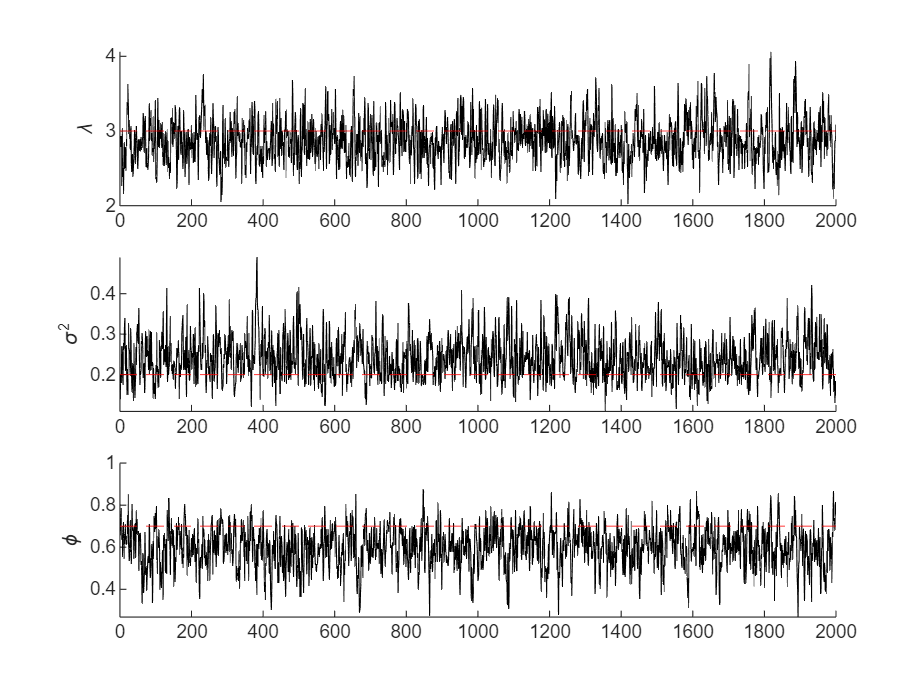
Plot trace plots and correlograms of the parameters.
paramnames = ["\phi" "\sigma^2" "\lambda"]; figure h = tiledlayout(numparams,1); for j = 1:numparams nexttile plot(ThetaPostDraws(j,:)) hold on yline(thetaDGP(j)) ylabel(paramnames(j)) end title(h,"Posterior Trace Plots")
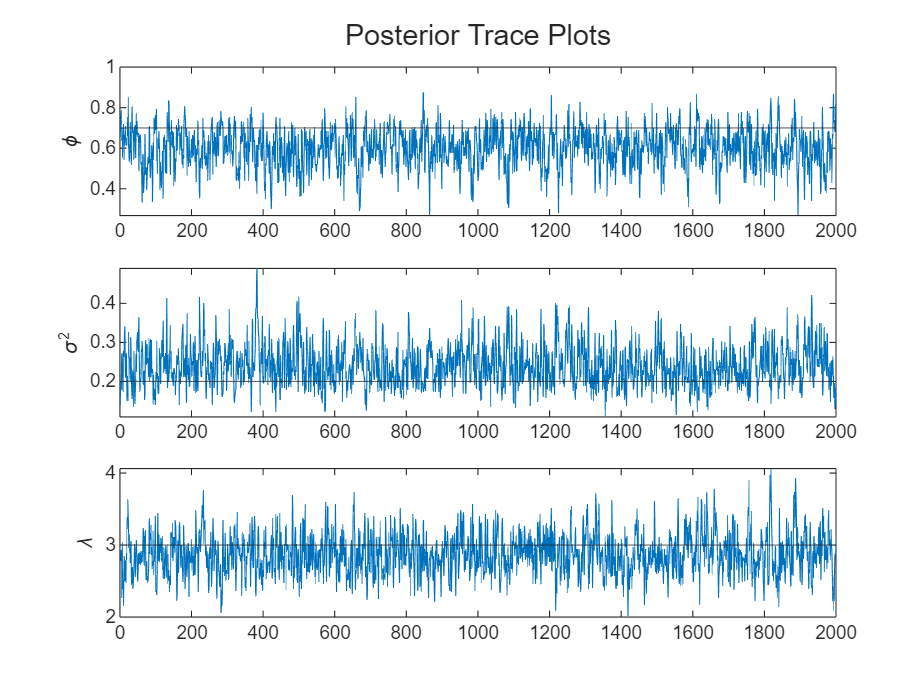
figure h = tiledlayout(numparams,1); for j = 1:numparams nexttile autocorr(ThetaPostDraws(j,:)); ylabel(paramnames(j)); title([]); end title(h,"Posterior Sample Correlograms")
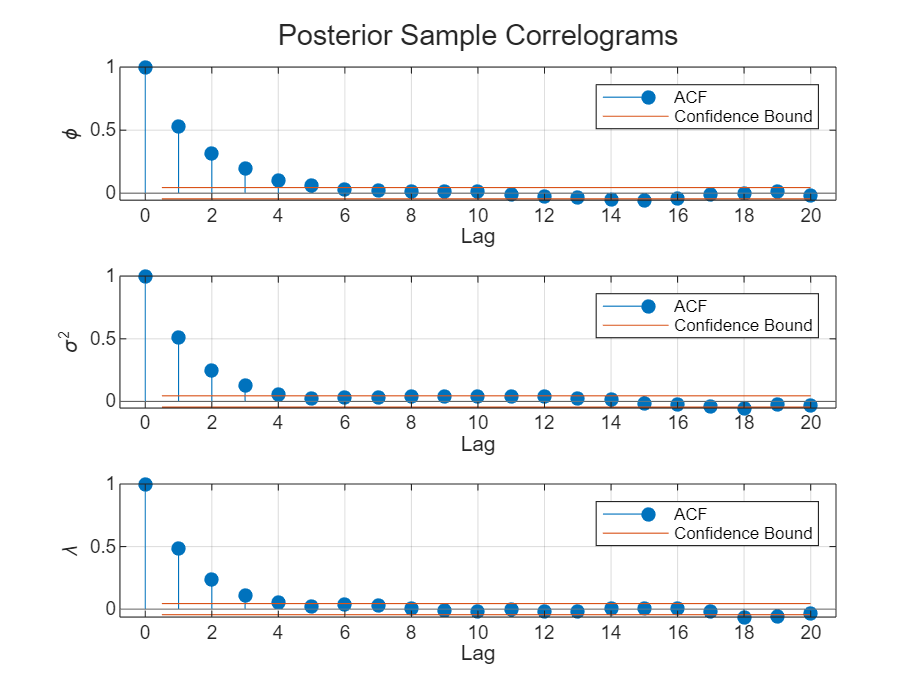
The sampler quickly settles near the true values of the parameters. The sample shows less serial correlation and little transient behavior.
Create a posterior model by setting the parameter distribution property of the prior model (ParamDistribution) to the posterior draws. Compute posterior means of each parameter.
PosteriorMdl = PriorMdl; PosteriorMdl.ParamDistribution = ThetaPostDraws; estParams = mean(ThetaPostDraws);
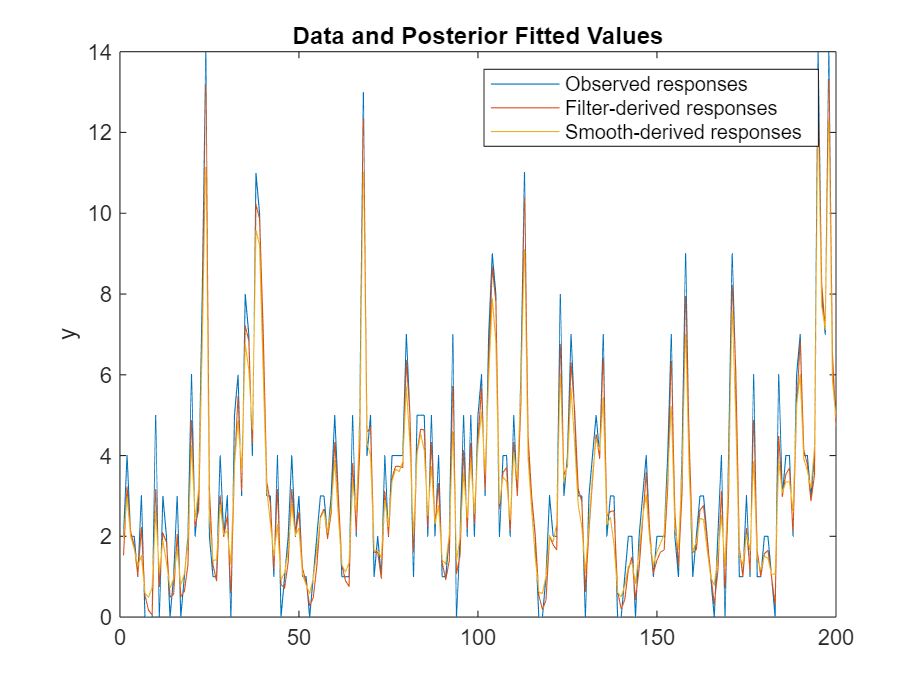
Use the posterior distribution to compute smoothed and filtered states, and then compute fitted values by transforming estimated state series to an observation series, which represents the series of Poisson means. Compare the means and the observed series.
figure xhats = smooth(PosteriorMdl,y,estParams); xhatf = filter(PosteriorMdl,y,estParams); yhats = estParams(3)*exp(xhats); yhatf = estParams(3)*exp(xhatf); plot([y yhatf yhats]) title("Data and Posterior Fitted Values") ylabel("y") legend("Observed responses","Filter-derived responses", ... "Smooth-derived responses") hold on
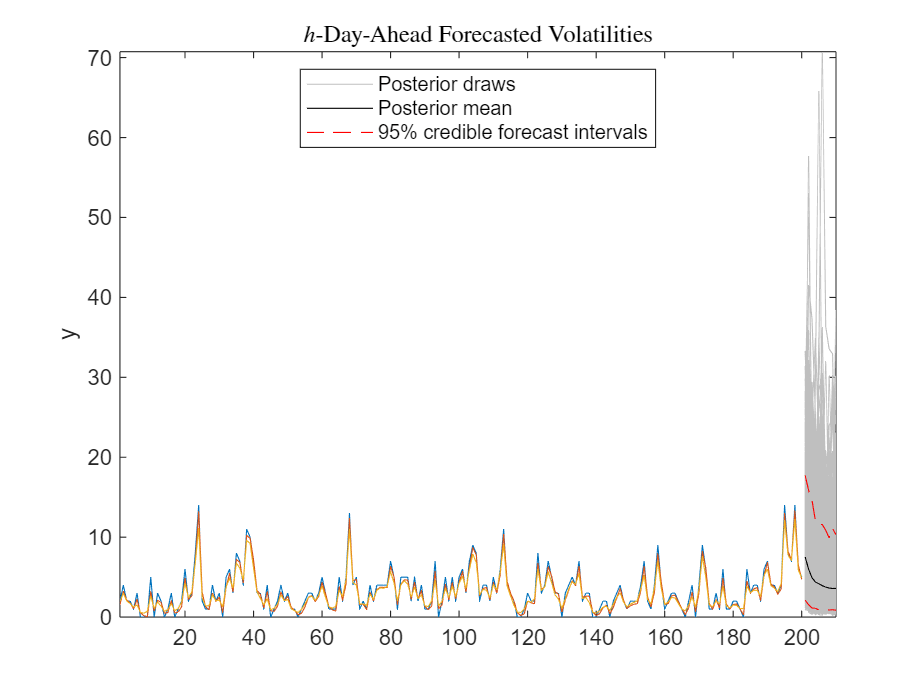
Forecast the Poisson mean into a 10-period horizon.
fh = 10; bigN = 1000; XF = zeros(fh + 1,bigN); yf = zeros(fh,bigN); XF(1,:) = xhats(end)*ones(1,bigN); phi = PosteriorMdl.ParamDistribution(1,(end-(bigN-1)):end); sigma2 = PosteriorMdl.ParamDistribution(2,(end-(bigN-1)):end); lambda = PosteriorMdl.ParamDistribution(3,(end-(bigN-1)):end); for j = 2:(fh+1) XF(j,:) = phi.*XF(j-1,:) + sqrt(sigma2).*randn(1,bigN); yf(j-1,:) = exp(XF(j,:)).*lambda; end yfmean = mean(yf,2); yfci = quantile(yf,[0.025 0.975],2); h1 = plot(T+(1:fh)',yf,Color=[0.75 0.75 0.75]); h2 = plot(T+(1:fh)',yfmean,"k"); h3 = plot(T+(1:fh)',yfci,"r--"); axis tight title("$h$-Day-Ahead Forecasted Volatilities",Interpreter="latex") legend([h1(1) h2 h3(1)], ... ["Posterior draws" "Posterior mean" "95% credible forecast intervals"], ... Location="best")
Local Functions
These functions specify the state-space model parameter mappings, in distribution form, and the log prior distribution of the parameters.
function [A,B,LogY,Mean0,Cov0,StateType] = paramMap(theta) A = theta(1); B = sqrt(theta(2)); LogY = @(y,x)y.*(x + log(theta(3)))- exp(x).*theta(3); Mean0 = 0; Cov0 = 2; StateType = 0; % Stationary state process end function logprior = priorDistribution(theta,hyperparams) % Prior of phi m0 = hyperparams(1); v20 = hyperparams(2); pphi = makedist("normal",mu=m0,sigma=sqrt(v20)); pphi = truncate(pphi,-1,1); lpphi = log(pdf(pphi,theta(1))); % Prior of sigma2 a0 = hyperparams(3); b0 = hyperparams(4); lpsigma2 = -a0*log(b0) - log(gamma(a0)) + (-a0-1)*log(theta(2)) - ... 1./(b0*theta(2)); % Prior of lambda alpha0 = hyperparams(5); beta0 = hyperparams(6); plambda = makedist("gamma",alpha0,beta0); lplambda = log(pdf(plambda,theta(3))); logprior = lpphi + lpsigma2 + lplambda; end
Consider the model in the example Draw Parameters From Posterior Distribution. Monitor the parameter draws as the MCMC sampler processes.
Create a Bayesian nonlinear state-space model (bnlssm) object that represents the DGP, and then simulate a response path.
rng(1,"twister") % For reproducibility T = 200; thetaDGP = [0.7; 0.2; 3]; numparams = numel(thetaDGP); paramnames = ["\phi" "\sigma^2" "\lambda"]; MdlXSim = arima(AR=thetaDGP(1),Variance=thetaDGP(2), ... Constant=0); xsim = simulate(MdlXSim,T); y = random("poisson",thetaDGP(3)*exp(xsim));
Create the Bayesian nonlinear state-space model template for estimation by passing function handles directly to paramMap and paramDistribution to bnlssm (the functions are in Local Functions). Tune the proposal distribution; suppress the tuning algorithm's output.
m0 = 0; v02 = 1; a0 = 1; b0 = 1; alpha0 = 3; beta0 = 1; hyperparams = [m0 v02 a0 b0 alpha0 beta0]; PriorMdl = bnlssm(@paramMap,@(x)priorDistribution(x,hyperparams), ... ObservationForm="distribution",Multipoint=["A" "LogY"]); theta0 = [0.5; 0.1; 2]; [params,Proposal] = tune(PriorMdl,y,theta0,Display="off");
The simulate function accepts a function handle to a function accepts a structure array containing key elements of the sampler at each iteration. This function enables you to process or monitor the sampler as it runs.
Write a function that plots each parameter as simulate pulls it from the posterior distribution. This function enables you to monitor the quality of the sampler so that you can, for example, stop the process if you suspect a longer burn-in period is required, rather than wait for the sampler to complete. You can use this function only in this example.
function out = plotProgress(inputstruct,h) out.iter = inputstruct.Iteration; np = numel(h); for jj = np:-1:1 out.out = inputstruct.Parameters(jj); addpoints(h(jj),out.iter,out.out) drawnow end end
Simulate from the posterior distribution. Specify the simulated response path as observed responses, an arbitrary set of initial parameter values to initialize the MCMC algorithm, and adjust the sampler the following ways:
Because the default burn-in period is 100 draws, specify a burn-in period of 200 (
BurnIn=200).Specify thinning the sample by keeping the first draw of each set of 10 successive draws (
Thin=10).Retain 2000 random parameter vectors (
NumDraws=2000).Set the proposal scale proportionality constant to 0.25 to increase the sample acceptance rate.
Set up separate trace plots for the parameters. Plot the progress of the sampler by specifying a handle to the output function plotProgress.
burnin = 200; thin = 10; numdraws = 2000; prop = 0.25; figure tiledlayout(numparams,1) for j = numparams:-1:1 nexttile h(j) = animatedline; hold on yline(thetaDGP(j),"r--") ylabel(paramnames(j)) end [ThetaPostDraws,accept] = simulate(PriorMdl,y,params,Proposal,Burnin=burnin,Thin=thin, ... NumDraws=numdraws,Proportion=prop,OutputFunction=@(x)plotProgress(x,h));
Local Functions
These functions specify the state-space model parameter mappings, in distribution form, and the log prior distribution of the parameters.
function [A,B,LogY,Mean0,Cov0,StateType] = paramMap(theta) A = theta(1); B = sqrt(theta(2)); LogY = @(y,x)y.*(x + log(theta(3)))- exp(x).*theta(3); Mean0 = 0; Cov0 = 2; StateType = 0; % Stationary state process end function logprior = priorDistribution(theta,hyperparams) % Prior of phi m0 = hyperparams(1); v20 = hyperparams(2); pphi = makedist("normal",mu=m0,sigma=sqrt(v20)); pphi = truncate(pphi,-1,1); lpphi = log(pdf(pphi,theta(1))); % Prior of sigma2 a0 = hyperparams(3); b0 = hyperparams(4); lpsigma2 = -a0*log(b0) - log(gamma(a0)) + (-a0-1)*log(theta(2)) - ... 1./(b0*theta(2)); % Prior of lambda alpha0 = hyperparams(5); beta0 = hyperparams(6); plambda = makedist("gamma",alpha0,beta0); lplambda = log(pdf(plambda,theta(3))); logprior = lpphi + lpsigma2 + lplambda; end
Draw posterior samples from a Bayesian nonlinear stochastic volatility model for daily S&P 500 closing returns. For a full exposition of this problem, see Fit Bayesian Stochastic Volatility Model to S&P 500 Volatility.
Consider the nonlinear state-space form of the stochastic volatility model for observed asset returns :
where:
for daily returns.
is a latent AR(1) process representing the conditional volatility series.
are are mutually independent and individually iid random standard Gaussian noise series.
The linear state-space coefficient matrices are:
The observation equation is nonlinear. Because is a standard Gaussian random variable, the conditional distribution of given and the parameters is Gaussian with a mean of 0 and standard deviation .
Load the data set Data_GlobalIdx1.mat, and then extract the S&P 500 closing prices (last column of the matrix Data).
load Data_GlobalIdx1 sp500 = Data(:,end); T = numel(sp500); dts = datetime(dates,ConvertFrom="datenum");
Convert the price series to returns, and then center the returns.
retsp500 = price2ret(sp500); y = retsp500 - mean(retsp500); retdts = dts(2:end);
The local function paramMap, which uses the distribution form for the observation equation, specifies this model structure. Unlike the parameter mapping function in Fit Bayesian Stochastic Volatility Model to S&P 500 Volatility, paramMap reduces the number of states to one for computational efficiency.
Assume a flat prior, that is, the log prior is 0 over the support of the parameters and -Inf everywhere else. The local function flatLogPrior specifies the prior.
Create a Bayesian nonlinear state-space model that specifies the model structure and prior distribution. Specify that the observation equation is in distribution form and that bnlssm functions can evaluate multiple particles simultaneously for A and LogY.
PriorMdl = bnlssm(@paramMap,@flatLogPrior,ObservationForm="distribution", ... Multipoint=["A" "LogY"]);
Tune the proposal distribution. Specify an arbitrarily chosen set of initial parameter values and the following settings:
Set the search interval for to (-1,1). Specified search intervals apply only to tuning the proposal.
Set the search interval for to (0,).
Specify computing the Hessian by the outer product of gradients.
For computational speed, do not sort the particles by using Hilbert sorting.
theta0 = [0.2 0 0.5]; lower = [-1; -Inf; 0]; upper = [1; Inf; Inf]; rng(1) [params,Proposal] = tune(PriorMdl,y,theta0,Lower=lower,Upper=upper, ... NumParticles=500,Hessian="opg",SortParticles=false);
Optimization and Tuning
| Params0 Optimized ProposalStd
----------------------------------------
c(1) | 0.2000 0.9949 0.0030
c(2) | 0 -0.0155 0.0116
c(3) | 0.5000 0.1495 0.0130
Obtain a sample from the posterior distribution. Specify the optimal proposal a burn-in period of 1e4 and retain every 25th draw to reduce serial correlation among the draws. The sampler, with these settings, takes some time to complete.
burnin = 1e4;
thin = 25;
[ThetaPost,accept] = simulate(PriorMdl,y,params,Proposal, ...
BurnIn=burnin,Thin=thin);
acceptaccept = 0.5131
Determine the quality of the posterior sample by plotting trace plots of the parameter draws.
figure
plot(ThetaPost(1,:))
title("Trace Plot: \beta")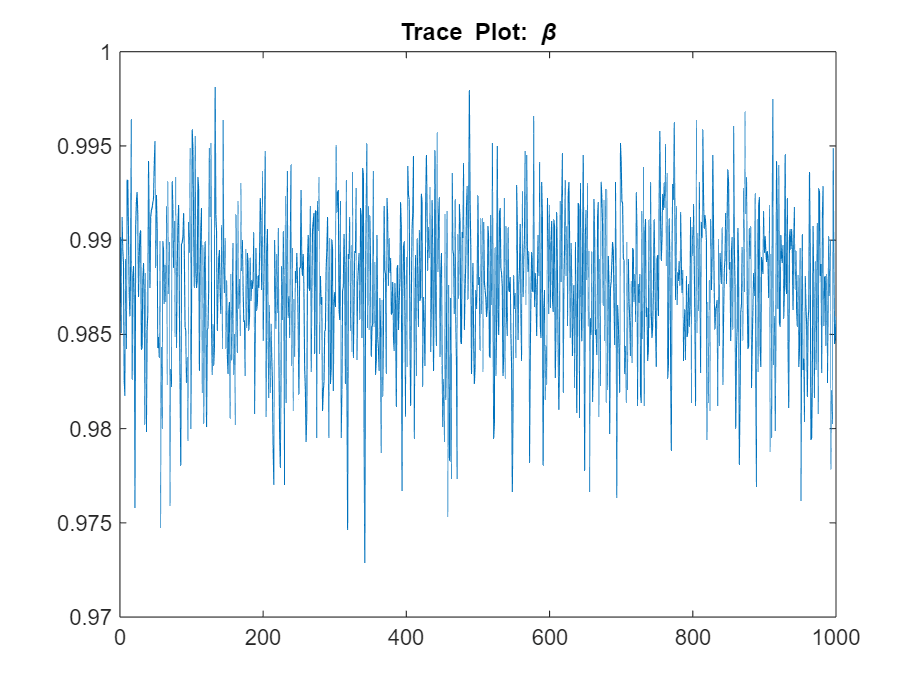
figure
plot(ThetaPost(2,:))
title("Trace Plot: \alpha")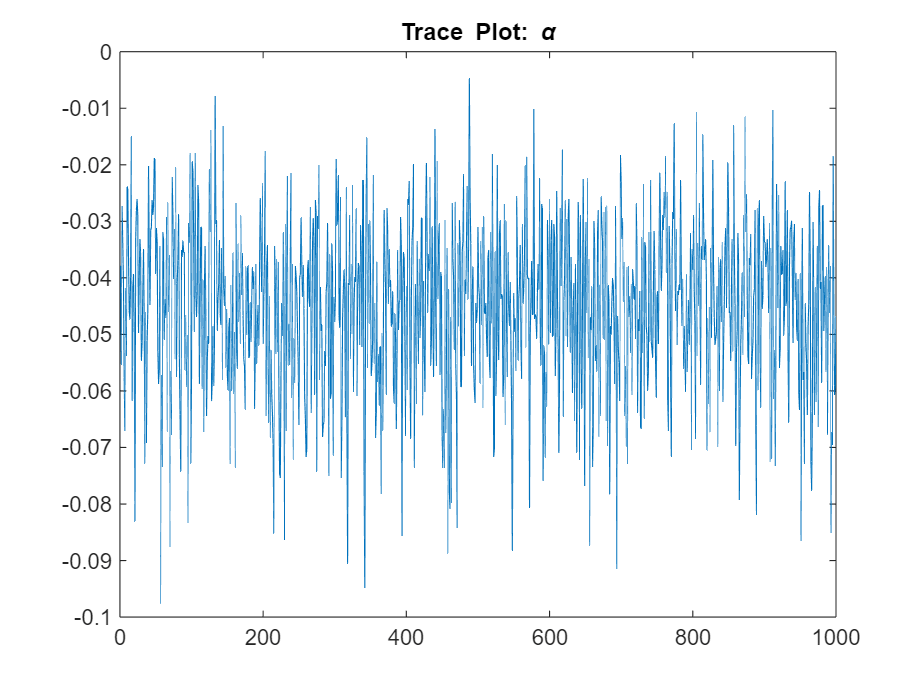
figure
plot(ThetaPost(3,:))
title("Trace Plot: \sigma")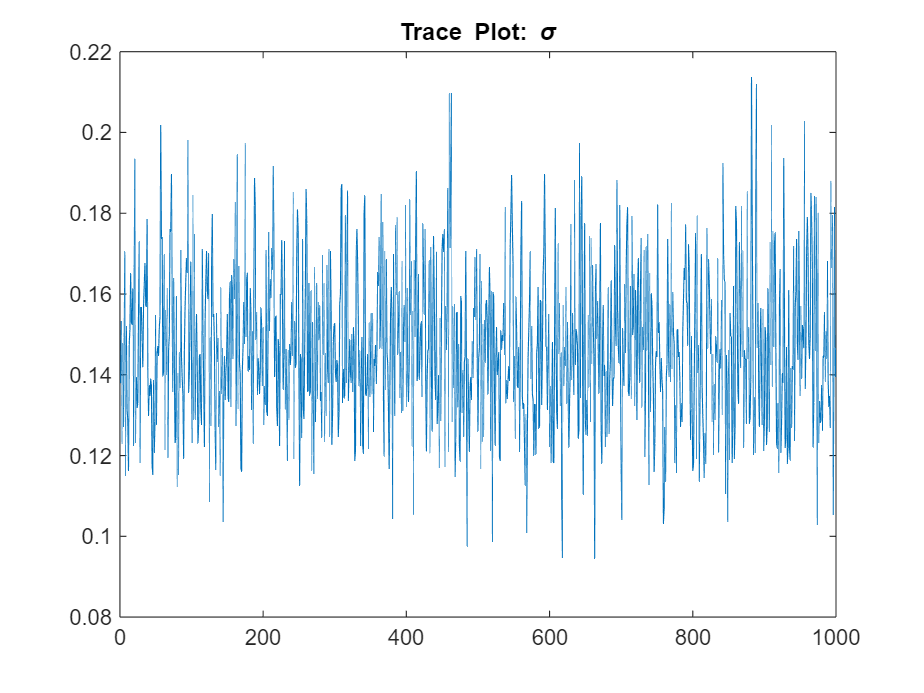
The posterior samples show good mixing with some minor serial correlation.
Local Functions
This example uses the following functions. paramMap is the parameter-to-matrix mapping function and flatLogPrior is the log prior distribution of the parameters.
function [A,B,LogY,Mean0,Cov0,StateType] = paramMap(theta) A = @(x) theta(2) + theta(1).*x; B = theta(3); LogY = @(y,x)-0.5.*x-0.5*365*y*y.*exp(-x); Mean0 = theta(2)./(1 - theta(1)); Cov0 = (theta(3)^2)./(1 - theta(1)^2); StateType = 0; end function logprior = flatLogPrior(theta) % flatLogPrior computes the log of the flat prior density for the three % variables in theta. Log probabilities for parameters outside the % parameter space are -Inf. paramcon = zeros(numel(theta),1); % theta(1) is the lag 1 term in a stationary AR(1) model. The % value needs to be within the unit circle. paramcon(1) = abs(theta(1)) >= 1 - eps; % alpha must be finite paramcon(2) = ~isfinite(theta(2)); % Standard deviation of the state disturbance theta(3) must be positive. paramcon(3) = theta(3) <= eps; if sum(paramcon) > 0 logprior = -Inf; else logprior = 0; % Prior density is proportional to 1 for all values % in the parameter space. end end
This example compares the performance of several SMC proposal particle resampling methods for obtaining random paths of parameter values from the posterior distribution of a quasi-nonnegative constrained state space model, which models nonnegative state quantities such as interest rates and prices:
and are iid standard Gaussian random variables.
Generate Artificial Data
Consider the following data-generating process (DGP)
Generate a random series of 200 observations from the DGP.
a0 = 0.1; a1 = 0.95; b = 1; d = 0.5; theta = [a0; a1; b; d]; T = 200; % Preallocate variables x = zeros(T,1); y = zeros(T,1); rng(0,"twister") % For reproducibility u = randn(T,1); e = randn(T,1); for t = 2:T x(t) = max(0,a0 + a1*x(t-1)) + b*u(t); y(t) = x(t) + d*e(t); end
Create Bayesian Nonlinear State-Space Model
The Local Functions section contains two functions required to specify the Bayesian nonlinear state-space model: the state-space model parameter mapping function paramMap and the prior distribution of the parameters priorDistribution. You can use the functions only within this script.
The paramMap function has these qualities:
Functions can simultaneously evaluate the state equation for multiple values of
A. Therefore, you can speed up calculations by specifying theMultipoint="A"option.The observation equation is in equation form, that is, the function composing the states is nonlinear and the innovation series is additive, linear, and Gaussian.
The priorDistribution function specifies a flat prior, which has a density that is proportional to 1 everywhere in the parameter space; it constrains the error standard deviations to be positive.
Create a Bayesian nonlinear state-space model characterized by the system.
PriorMdl = bnlssm(@paramMap,@priorDistribution,Multipoint="A");Draw Random Parameter Paths from Posterior Using Each Proposal Sampler Method
Obtain random parameter paths from the joint posterior distribution using the bootstrap, optimal, and one-pass unscented particle resampling methods. Tune the sampler initialized from a randomly drawn set of values in [0,1], thin the sample by a factor of 10, specify a burn-in period of 100, and draw 1000 paths.
numDraws = 1000; smcMethod = ["bootstrap" "optimal" "unscented"]; for j = 3:-1:1 % Set last element first to preallocate entire cell vector params0 = rand(4,1); [params,Proposal] = tune(PriorMdl,y,params0,Display="off",NewSamples=smcMethod(j)); thetaSim{j} = simulate(PriorMdl,y,params,Proposal,NewSamples=smcMethod(j), ... NumDraws=numDraws,Thin=10,Burnin=100); end
Separately for each parameter, draw histograms of the posterior draws for each method on the same plot.
figure tiledlayout(2,2) varnames = ["a0" "a1" "b" "d"]; for j = 1:numel(theta) nexttile h1 = histogram(thetaSim{1}(j,:)); hold on h2 = histogram(thetaSim{2}(j,:)); h3 = histogram(thetaSim{3}(j,:)); h4 = xline(theta(j),"--",LineWidth=2); hold off title(varnames(j)) end legend([h1 h2 h3 h4],[smcMethod "True"])
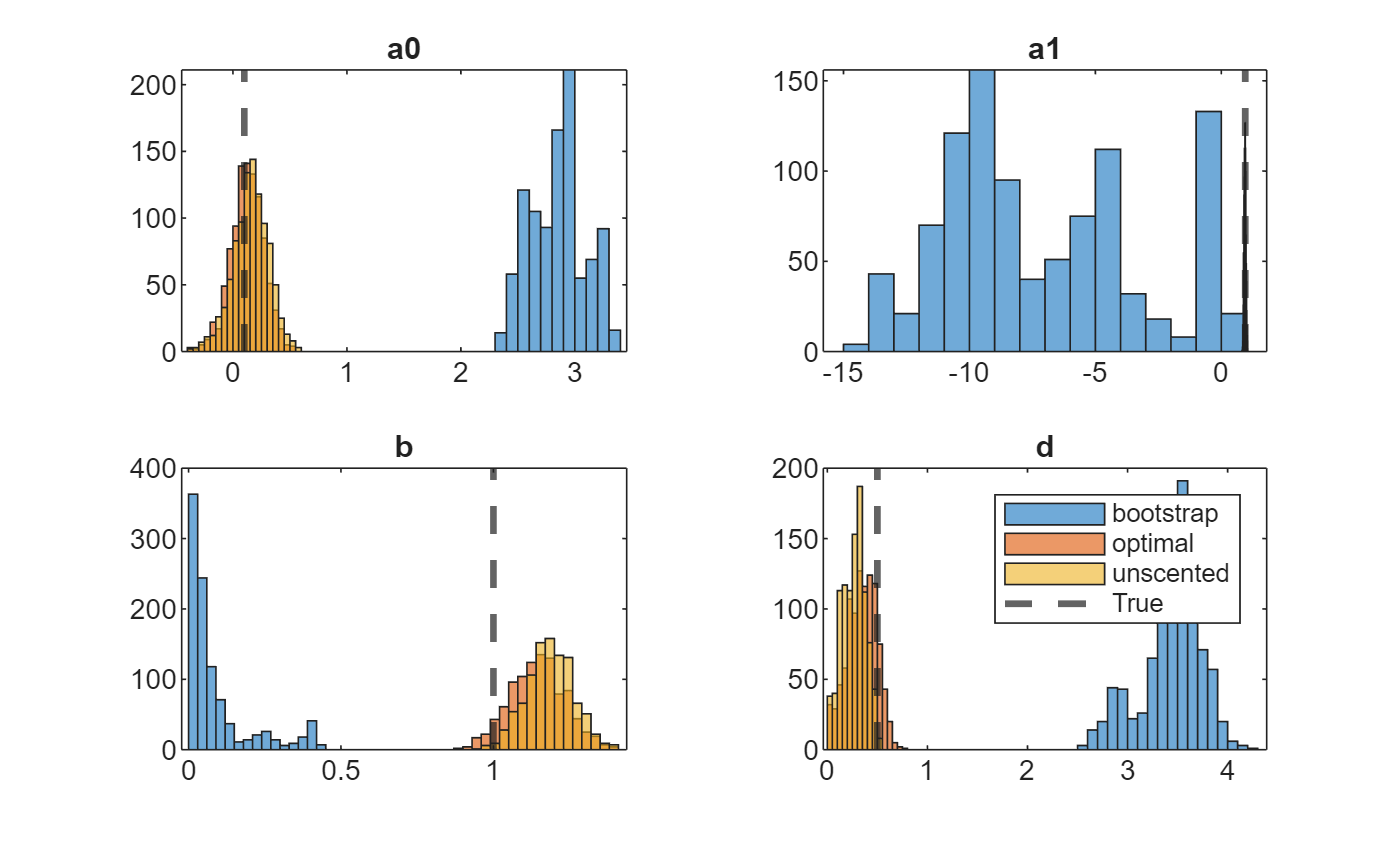
In this case, the optimal and one-pass unscented methods yield distributions closer to the true values than the bootstrap method.
Local Functions
These functions specify the state-space model parameter mappings, in equation form, and log prior distribution of the parameters.
function [A,B,C,D,mean0,Cov0] = paramMap(params) a0 = params(1); a1 = params(2); b = params(3); d = params(4); A = @(x) max(0,a0+a1.*x); B = b; C = 1; D = d; mean0 = 0; Cov0 = 1; end function logprior = priorDistribution(theta) paramconstraints = theta(3:4) <= 0; % b and d are greater than 0 if(sum(paramconstraints)) logprior = -Inf; else logprior = 0; % Prior density is proportional to 1 for all values % in the parameter space. end end
Input Arguments
Name-Value Arguments
Output Arguments
Tips
In general, you can reproduce results by setting
rng. However, to pass normal random numbers generated byfilteras particles tosimulate, set theRNDargument to those random numbers.Unless you set
Cutoff=0,simulateresamples particles according to the specified resampling methodResample. Although resampling particles with high weights improves the results of the SMC, you should also allow the sampler traverse the proposal distribution to obtain novel, high-weight particles. To do this, experiment withCutoff.Acceptance rates from
acceptthat are relatively close to 0 or 1 indicate that the Markov chain does not sufficiently explore the posterior distribution. To obtain an appropriate acceptance rate for your data, tune the sampler by implementing one of the following procedures.Use the
tunefunction to search for the posterior mode by numerical optimization.tunereturns optimized parameters and the proposal scale matrix, which is proportional to the negative Hessian matrix evaluated at the posterior mode. Pass the optimized parameters and the proposal scale tosimulate, and tune the proportionality constant by using theProportionname-value argument. Small values ofProportiontend to increase the proposal acceptance rates of the MH sampler.Perform a multistage simulation:
Choose an initial value for the input
Proposaland simulate draws from the posterior.Compute the sample covariance matrix, and pass the result to
simulateas an updated value forProposal.Repeat steps 1 and 2 until
acceptis reasonable for your data.
Avoid an arbitrary choice of the initial state distribution.
bnlssmfunctions generate the initial particles from the specified initial state distribution, which impacts the performance of the nonlinear filter. If the initial state specification is bad enough, importance weights concentrate on a small number of particles in the first SMC iteration, which might produce unreasonable filtering results. This vulnerability of the nonlinear model behavior contrasts with the stability of the Kalman filter for the linear model, in which the initial state distribution usually has little impact on the filter because the prior is washed out as it processes data.
Algorithms
simulateaccommodates missing data by not updating filtered state estimates corresponding to missing observations. In other words, suppose there is a missing observation at period t. Then, the state forecast for period t based on the previous t – 1 observations and filtered state for period t are equivalent.
References
[6] Fernández-Villaverde, Jesús, and Juan F. Rubio-Ramírez. "Estimating Macroeconomic Models: A Likelihood Approach." Review of Economic Studies 70(October 2007): 1059–1087. https://doi.org/10.1111/j.1467-937X.2007.00437.x.