ctrectmeas
Measurement function of constant turn-rate motion model for rectangular targets
Description
measurements = ctrectmeas(states,detections)gmphd object can use ctrectmeas as its
MeasurementFcn.
Examples
Load detections and truth generated from a rectangular target.
load('rectangularTargetDetections.mat','detections','truthState');
Generate expected detections from the target's rectangular state and actual detections using ctrectmeas.
tgtState = [3;48;0;60;0;5;1.9]; zExp = ctrectmeas(tgtState,detections);
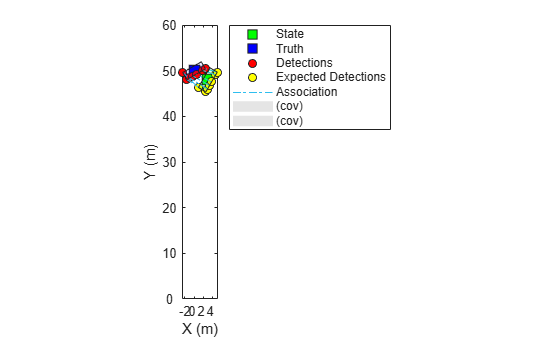
Set up visualization environment using theaterPlot.
theaterP = theaterPlot; stateP = trackPlotter(theaterP,'DisplayName','State','MarkerFaceColor','g'); truthP = trackPlotter(theaterP,'DisplayName','Truth','MarkerFaceColor', 'b'); detP = detectionPlotter(theaterP,'DisplayName','Detections','MarkerFaceColor','r'); expDetP = detectionPlotter(theaterP,'DisplayName','Expected Detections','MarkerFaceColor','y'); l = legend(theaterP.Parent); l.AutoUpdate = 'on'; hold on; assignP = plot(theaterP.Parent,NaN,NaN,'-.','DisplayName','Association');
Plot actual and expected detections.
inDets = [detections{:}];
inMeas = horzcat(inDets.Measurement);
detP.plotDetection(inMeas');
zExpPlot = reshape(zExp,3,[]);
expDetP.plotDetection(zExpPlot');Plot association lines.
zLines = nan(2,numel(detections)*3); zLines(1,1:3:end) = zExpPlot(1,:); zLines(2,1:3:end) = zExpPlot(2,:); zLines(1,2:3:end) = inMeas(1,:); zLines(2,2:3:end) = inMeas(2,:); assignP.XData = zLines(1,:); assignP.YData = zLines(2,:);
Plot truth and state.
truthPos = [truthState(1:2);0]; truthDims = struct('Length',truthState(6),... 'Width',truthState(7),... 'Height', 0,... 'OriginOffset', [0 0 0]); truthOrient = quaternion([truthState(4) 0 0],'eulerd', 'ZYX','frame'); truthP.plotTrack(truthPos',truthDims,truthOrient); statePos = [tgtState(1:2);0]; stateDims = struct('Length',tgtState(6),... 'Width',tgtState(7),... 'Height',0,... 'OriginOffset', [0 0 0]); stateOrient = quaternion([tgtState(4) 0 0],'eulerd', 'ZYX','frame'); stateP.plotTrack(statePos', stateDims, stateOrient);
Input Arguments
Output Arguments
References
[1] Granström, Karl, et al. “Tracking Rectangular and Elliptical Extended Targets Using Laser Measurements.” 14th International Conference on Information Fusion, 2011, pp. 1–8. IEEE Xplore
Extended Capabilities
Version History
Introduced in R2019b
See Also
trackerPHD | gmphd | ctrect | ctrectmeasjac | ctrectjac | initctrectgmphd | ctrectcorners