trackAssignmentMetrics
Track establishment, maintenance, and deletion metrics
Description
The trackAssignmentMetrics
System object™ compares tracks from a multi-object tracking system against known truth by
automatic assignment of tracks to the known truths at each track update. An assignment
distance metric determines the maximum distance for which a track can be assigned to the truth
object. A divergence distance metric determines when a previously assigned track can be
reassigned to a different truth object when the distance exceeds another set threshold.
To generate track assignment metrics:
Create the
trackAssignmentMetricsobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
assignmentMetrics = trackAssignmentMetricstrackAssignmentMetrics
System object, assignmentMetrics, with default property
values.
assignmentMetrics = trackAssignmentMetrics(Name,Value)trackAssignmentMetrics object using one or more
name-value pairs. For example, assignmentMetrics =
trackAssignmentMetrics('AssignmentThreshold',5) creates a
trackAssignmentMetrics object with an assignment threshold of 5.
Enclose property names in quotes.
Properties
Usage
To compute metrics, call the track assignment metrics with arguments, as if it were a function (described here).
Description
[
returns structures, tracksummary,truthsummary] = assignmentMetrics(tracks,truths)tracksummary and
truthsummary, containing cumulative metrics across all
tracks and truths, obtained from the previous
object update.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Examine the assignments and errors for a system tracking two targets.
First, load the stored track data.
load trackmetricex tracklog truthlog
Create objects to analyze assignment and error metrics.
tam = trackAssignmentMetrics; tem = trackErrorMetrics;
Create the output variables.
posRMSE = zeros(numel(tracklog),1); velRMSE = zeros(numel(tracklog),1); posANEES = zeros(numel(tracklog),1); velANEES = zeros(numel(tracklog),1);
Loop over all tracks to:
Extract the tracks and ground truth at the i th tracker update.
Analyze and retrieve the current track-to-truth assignment.
Analyze instantaneous error metrics over all tracks and truths.
for i=1:numel(tracklog) tracks = tracklog{i}; truths = truthlog{i}; [trackAM,truthAM] = tam(tracks, truths); [trackIDs,truthIDs] = currentAssignment(tam); [posRMSE(i),velRMSE(i),posANEES(i),velANEES(i)] = ... tem(tracks,trackIDs,truths,truthIDs); end
Show the track metrics table.
trackMetricsTable(tam)
ans=4×16 table
TrackID AssignedTruthID Surviving TotalLength UnreportedStatus DeletionStatus DeletionLength DivergenceStatus DivergenceCount DivergenceLength RedundancyStatus RedundancyCount RedundancyLength FalseTrackStatus FalseTrackLength SwapCount
_______ _______________ _________ ___________ ________________ ______________ ______________ ________________ _______________ ________________ ________________ _______________ ________________ ________________ ________________ _________
1 NaN false 1120 false false 0 false 3 3 false 0 0 false 0 0
2 NaN false 1736 false false 0 false 8 88 false 0 0 false 28 3
6 3 true 1138 false false 0 false 4 314 false 1 28 false 0 2
8 2 true 662 false false 0 false 2 29 false 1 169 false 28 0
Show the truth metrics table.
truthMetricsTable(tam)
ans=2×11 table
TruthID AssociatedTrackID DeletionStatus TotalLength UnreportedStatus BreakStatus BreakCount BreakLength InCoverageArea EstablishmentStatus EstablishmentLength
_______ _________________ ______________ ___________ ________________ ___________ __________ ___________ ______________ ___________________ ___________________
2 8 false 2678 false false 4 168 true true 56
3 6 false 2678 false false 3 645 true true 84
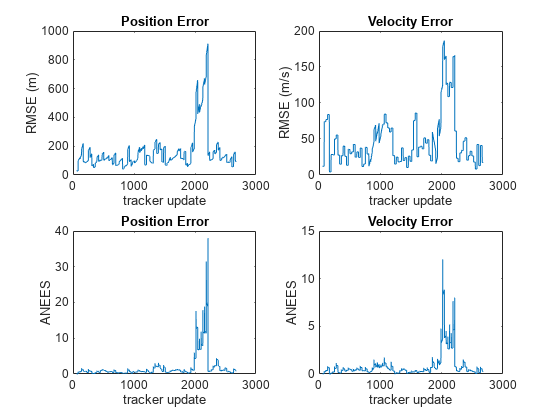
Plot the RMSE and ANEES error metrics.
subplot(2,2,1) plot(posRMSE) title('Position Error') xlabel('tracker update') ylabel('RMSE (m)') subplot(2,2,2) plot(velRMSE) title('Velocity Error') xlabel('tracker update') ylabel('RMSE (m/s)') subplot(2,2,3) plot(posANEES) title('Position Error') xlabel('tracker update') ylabel('ANEES') subplot(2,2,4) plot(velANEES) title('Velocity Error') xlabel('tracker update') ylabel('ANEES')
Show the current error metrics for each individual recorded track.
currentTrackMetrics(tem)
ans=2×5 table
TrackID posRMS velRMS posANEES velANEES
_______ ______ ______ ________ ________
6 44.712 20.988 0.05974 0.31325
8 129.26 12.739 1.6745 0.2453
Show the current error metrics for each individual recorded truth object.
currentTruthMetrics(tem)
ans=2×5 table
TruthID posRMS velRMS posANEES velANEES
_______ ______ ______ ________ ________
2 129.26 12.739 1.6745 0.2453
3 44.712 20.988 0.05974 0.31325
Show the cumulative error metrics for each individual recorded track.
cumulativeTrackMetrics(tem)
ans=4×5 table
TrackID posRMS velRMS posANEES velANEES
_______ ______ ______ ________ ________
1 117.69 43.951 0.58338 0.44127
2 129.7 42.8 0.81094 0.42509
6 371.35 87.083 4.5208 1.6952
8 130.45 53.914 1.0448 0.44813
Show the cumulative error metrics for each individual recorded truth object.
cumulativeTruthMetrics(tem)
ans=2×5 table
TruthID posRMS velRMS posANEES velANEES
_______ ______ ______ ________ ________
2 258.21 65.078 2.2514 0.93359
3 134.41 48.253 0.96314 0.49183
References
[1] Colegrove, S. B., et al. “A Tracker Assessment Tool for Comparing Tracker Performance.” DSTO-TR-1694 (2005). DSTO Information Sciences Laboratory.
[2] Votruba, P., et al. "Single % Integrated Air Picture (SIAP) Metrics Implementation." SIAP SE TF TR 2001-003 (2001). Single Integrated Air Picture System Engineering Task Force.