Track Fusion
These examples fuse tracks obtained from multiple tracking sources using a track to track fuser.
Featured Examples
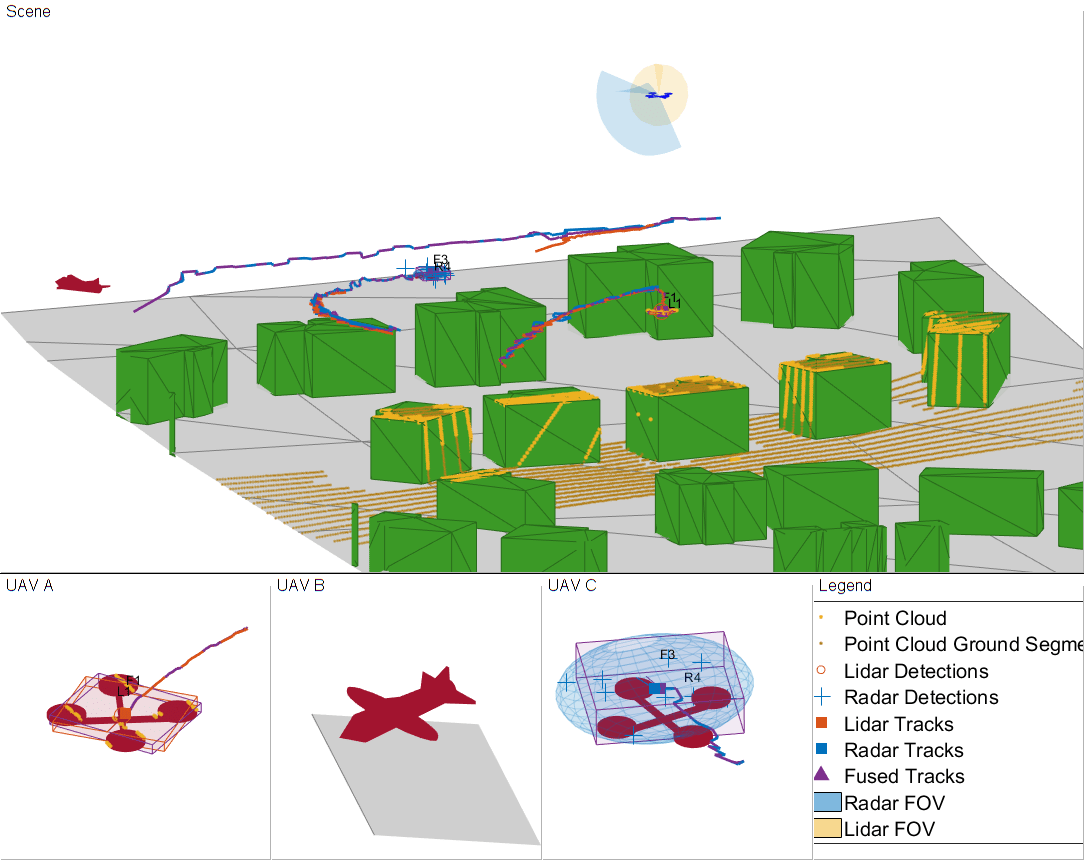
Lidar and Radar Fusion in Urban Air Mobility Scenario
Use multiobject trackers to track various unmanned aerial vehicles in an urban environment.
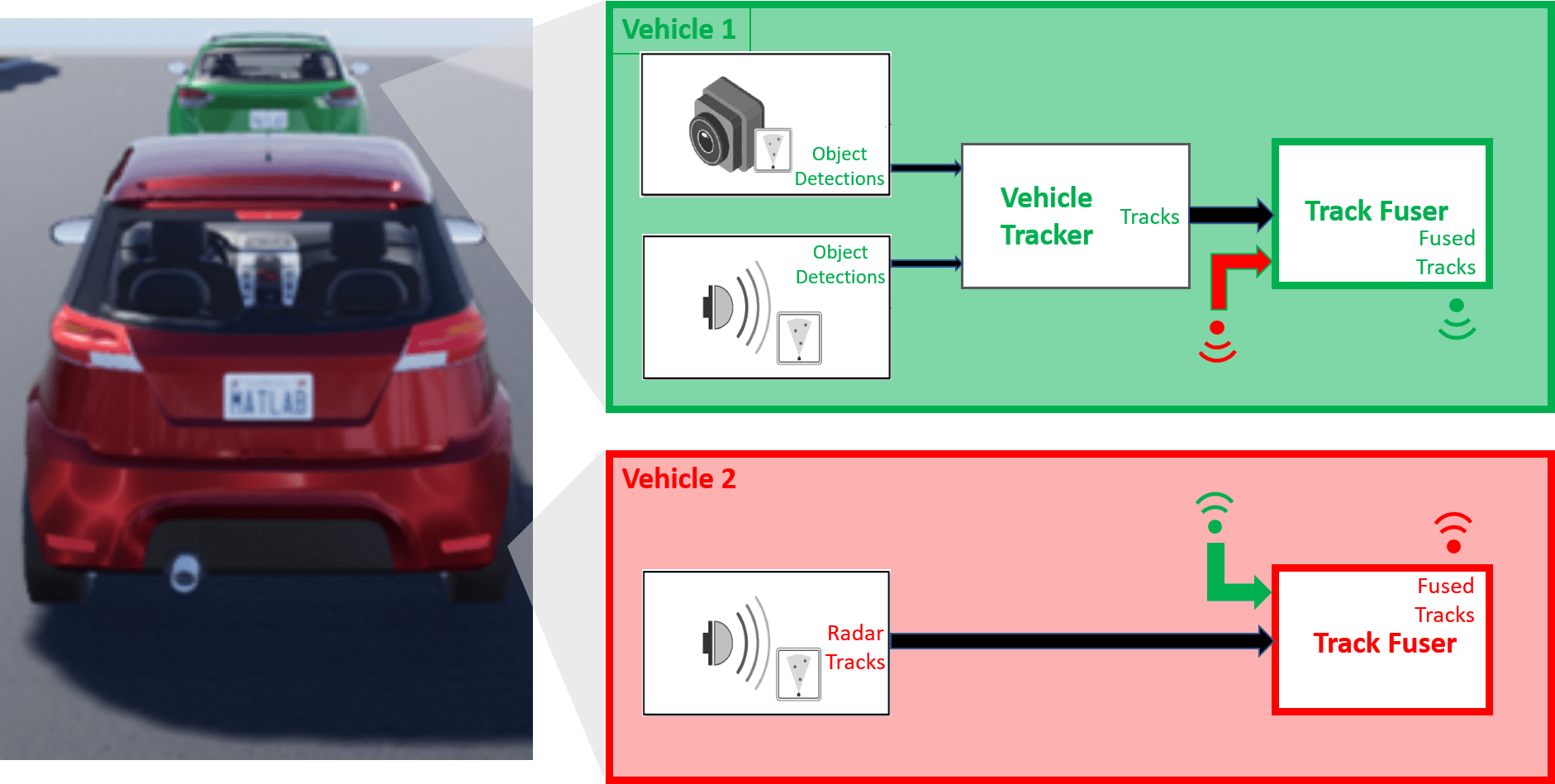
Track-to-Track Fusion for Automotive Safety Applications
Fuse tracks from two vehicles to provide a more comprehensive estimate of the environment than can be seen by each vehicle. The example demonstrates the use of a track-level fuser and the object track data format. In this example, you use the driving scenario and vision detection generator from Automated Driving Toolbox™, the radar data generator from the Radar Toolbox™, and the tracking and track fusion models from Sensor Fusion and Tracking Toolbox™.

Track-Level Fusion of Radar and Lidar Data
Generate an object-level track list from measurements of a radar and a lidar sensor and further fuse them using a track-level fusion scheme. You process the radar measurements using an extended object tracker and the lidar measurements using a joint probabilistic data association (JPDA) tracker. You further fuse these tracks using a track-level fusion scheme. The schematic of the workflow is shown below.
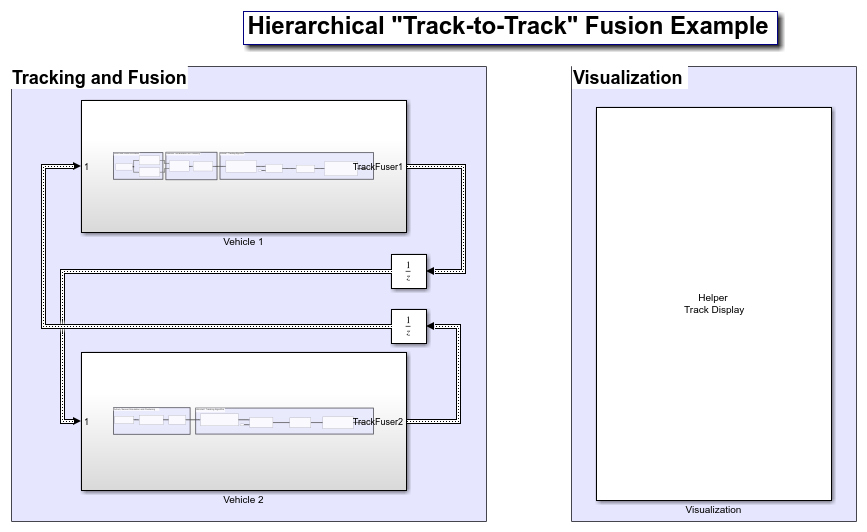
Track-to-Track Fusion for Automotive Safety Applications in Simulink
Perform track-to-track fusion in Simulink® with Sensor Fusion and Tracking Toolbox™. In the context of autonomous driving, the example illustrates how to build a decentralized tracking architecture using a Track-To-Track Fuser block. In the example, each vehicle performs tracking independently as well as fuses tracking information received from other vehicles. This example closely follows the Track-to-Track Fusion for Automotive Safety Applications MATLAB® example.
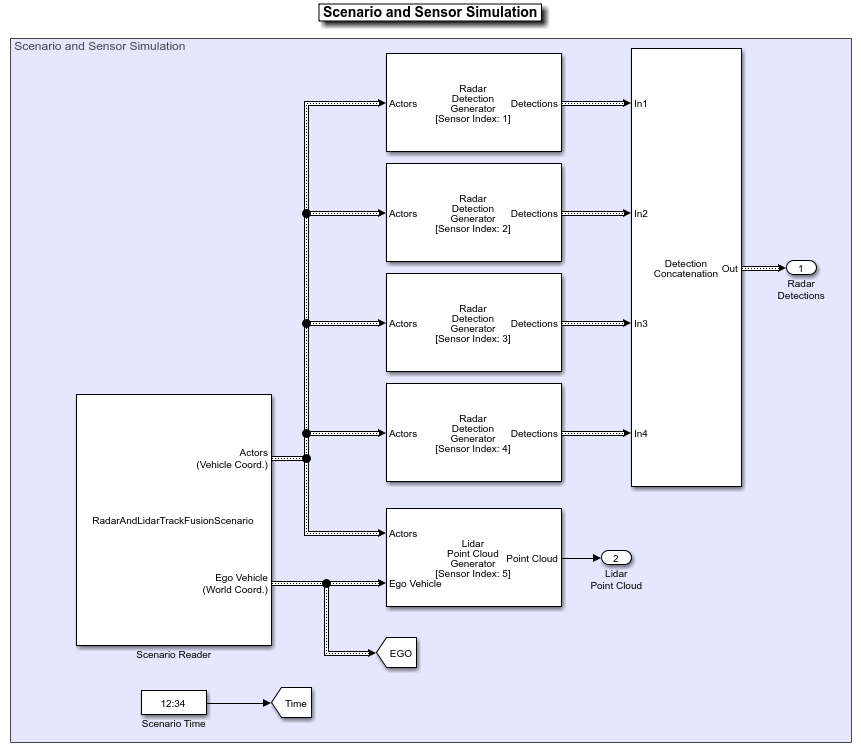
Track-Level Fusion of Radar and Lidar Data in Simulink
Autonomous systems require precise estimation of their surroundings to support decision making, planning, and control. High-resolution sensors such as radar and lidar are frequently used in autonomous systems to assist in estimation of the surroundings. These sensors generally output tracks. Outputting tracks instead of detections and fusing the tracks together in a decentralized manner provide several benefits, including low false alarm rates, higher target estimation accuracy, a low bandwidth requirement, and low computational costs. This example shows you how to track objects from measurements of a radar and a lidar sensor and how to fuse them using a track-level fusion scheme in Simulink®. You process the radar measurements using a Gaussian Mixture Probability Hypothesis Density (GM-PHD) tracker and the lidar measurements using a Joint Probabilistic Data Association (JPDA) tracker. You further fuse these tracks using a track-level fusion scheme. The example closely follows the Track-Level Fusion of Radar and Lidar Data MATLAB® example.