Set Up for HDL Cosimulation
To cosimulate your HDL code with a MATLAB® or Simulink® design, you must first:
Decide how to connect your HDL simulator with MATLAB or Simulink. You may have one or multiple HDL modules in a cosimulation setup. The modules are represented by
matlabcpandmatlabtbfunctions orhdlcosimulationsystem objects for MATLAB, or by HDL Cosimulation blocks for Simulink. See Cosimulation Configurations.Start the HDL simulator from MATLAB, or from a shell. You must use a shell for a cross-network simulation, such as if the HDL simulator runs on a different machine from your MATLAB host. Starting the simulator from MATLAB allows you to specify the library by name rather than exact path. See HDL Simulator Startup.
If you require a non-default library or customized library location, specify the library when you start the HDL simulator. If you start the HDL simulator from MATLAB, use the name of the library. If you start the HDL simulator from a shell, use the library path. See Cosimulation Libraries.
Optionally, use the configuration and diagnostic script to configure your library location and test the TCP/IP connection. This script is supported only for Linux® machines. For Windows® machines, you can create a configuration file. See HDL Simulator Startup.
Cosimulation Configurations
There are several ways to connect your HDL simulator to a design in MATLAB or Simulink. You can run your HDL simulator on the same or different host machine as MATLAB. Each HDL simulator can connect to one or more functions in MATLAB, or one or more HDL Cosimulation blocks in a Simulink model. In a network configuration, to identify your application servers, use an Internet address and a TCP/IP socket port.
Note
Vivado® cosimulation is supported via one HDL Cosimulation block in Simulink or one
VivadoHDLCosimulationsystem object in MATLAB connected to the HDL simulator.An instance of MATLAB can run only one instance of the MATLAB server (
hdldaemon) at a time.Each HDL simulator must communicate with a unique instance of the MATLAB server.
Shared memory communication is an option for configurations that require only one communication link on a single computing system.
TCP/IP socket communication is required for configurations that use multiple communication links on one or more computing systems. Unique TCP/IP socket ports distinguish the communication links.
Valid Configurations for HDL Cosimulation with MATLAB
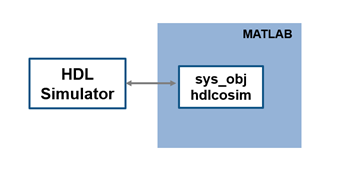
| An HDL simulator session connected to a MATLAB function through a single instance of the MATLAB server. |
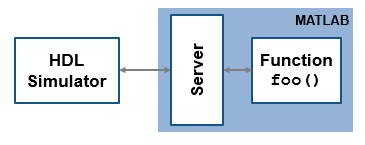
|
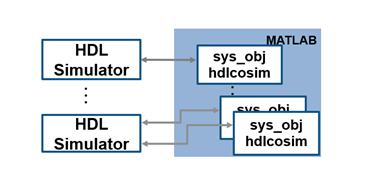
| An HDL simulator session connected to multiple MATLAB functions through a single instance of the MATLAB server. |

|
| An HDL simulator session connected to a MATLAB function through multiple instances of the MATLAB server. Each instance runs within the scope of a unique MATLAB session). This configuration is not supported by the Cosimulation Wizard. |

|
| Multiple HDL simulator sessions, each connected to a MATLAB function through multiple instances of the MATLAB server. Each instance runs within the scope of a unique MATLAB session. |
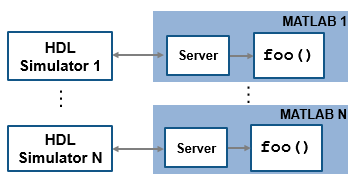
|
An Note This configuration is supported for Vivado cosimulation. |
|
Multiple |
|
Valid Configurations for Cosimulation with Simulink
An HDL Cosimulation block in a Simulink model connected to a single HDL simulator session. Note This configuration is supported for Vivado cosimulation.
|

|
| Multiple HDL Cosimulation blocks in a Simulink model connected to the same HDL simulator session. This configuration is not supported by the Cosimulation Wizard. You can combine multiple HDL modules into a higher level module to include them in a single HDL Cosimulation block. |
|
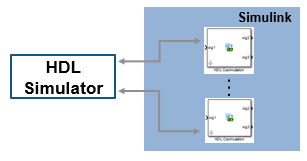
| Multiple HDL Cosimulation blocks in a Simulink model connected to different HDL simulator sessions. HDL Cosimulation blocks in a Simulink model can connect to the same or different HDL simulator sessions. Each HDL Cosimulation block can communicate with only one HDL simulator. |

|
HDL Simulator Startup
You can start the HDL simulator from MATLAB, or from a shell. You must use a shell for a cross-network simulation, such as if the HDL simulator runs on a different machine from your MATLAB host. Starting the simulator from MATLAB allows you to specify the library by name rather than exact path.
Vivado users are not required to start the HDL simulator separately from MATLAB or Simulink, since Vivado cosimulation is executed as one process with a shared DLL.
Set up for Cosimulation with Vivado
When using the Vivado simulator you must first use the Cosimulation Wizard
or HDL Workflow Advisor to create an HDL Cosimulation block or an hdlverifier.VivadoHDLCosimulation
System object.
Use the Cosimulation Wizard to generate cosimulation artifacts when you already have an HDL DUT. Use the HDL Workflow Advisor to generate an HDL DUT (requires HDL Coder™), in addition to cosimulation artifacts.
For Vivado setup on Windows, you must set the following variables. If you are using the Cosimulation Wizard, it ensures you set these variables correctly:
%PATH%must point to Vivado executables (such asvivado,xelab,xvlog, andxvhdl).%PATH%must point to Vivado libraries (%XILINX_VIVADO%\lib\win64.o).
For Vivado setup on Linux, you must set these variables before starting MATLAB:
$PATHmust point to Vivado executables (the Cosimulation Wizard ensures that you set it properly).$LD_LIBRARY_PATHmust point to Vivado libraries ($XILINX_VIVADO/lib/lnx64.o). This must be done before starting MATLAB.
To set $LD_LIBRARY_PATH on Linux, perform the following in a csh shell
prompt:
csh> setenv LD_LIBRARY_PATH /tools/Vivado/2020.2-mw-0/Lin/Vivado/2020.2/lib/lnx64.o:$LD_LIBRARY_PATH csh> matlab
For other shell types, enter the following:
sh> export LD_LIBRARY_PATH=/tools/Vivado/2020.2-mw-0/Lin/Vivado/2020.2/lib/lnx64.o:$LD_LIBRARY_PATH sh> matlab
Alternatively, create a /etc/ld.so.conf.d/xilvivado.conf
file and then invoke it using ldconfig (requires root
privileges). File contents:
# to automatically find Xilinx Vivado libraries from MATLAB applications such as HDL Cosimulation using HDL Verifier. # (despite the name, this is a folder that holds linux *libraries*) # reload updates to this file via: sudo ldconfig /tools/Vivado/2020.2-mw-0/Lin/Vivado/2020.2/lib/lnx64.o
Then invoke it by executing:
sh> sudo ldconfig
Start the HDL Simulator from MATLAB
Each supported HDL simulator has a unique command that opens it from MATLAB.
Note
If you use the Cosimulation Wizard, you do not need to start the HDL simulator separately.
| HDL Simulator | Command to Open the Simulator | Example |
|---|---|---|
Cadence® Xcelium™ | nclaunch | Start Cadence Xcelium from MATLAB |
| Siemens® ModelSim™ | vsim | Start Siemens ModelSim from MATLAB |
Synopsys® VCS® | launchVCS | Start Synopsys VCS from MATLAB |
In any function, you can specify the HDL Verifier library, the design to load, the type of communication connection information and other required parameters as name-value arguments. No special setup is required. See Cosimulation Libraries.
This function starts and configures the HDL simulator for use with the
HDL Verifier™ software. By default, the function starts the first version of the
simulator executable that it finds on the system path, as defined by the
path variable. This function uses a temporary file that
is overwritten each time the HDL simulator starts.
You can customize the startup file and communication mode to be used between
MATLAB or Simulink and the HDL simulator by specifying name-value arguments when you
call the function. For property details, see nclaunch, vsim, or launchVCS.
To start a different version of the simulator executable than the first one
found on the system path, use the setenv and
getenv
MATLAB functions to set and get the environment of any subshells spawned
by UNIX(), DOS(), or
system().
If you specify a communication mode when you call one of the functions that open the HDL simulator, the specified mode applies to all HDL simulator sessions connected to either MATLAB or Simulink.
For more information on how HDL Verifier links the HDL simulator with MATLAB, see Linking with MATLAB and the HDL Simulator.
For a full cosimulation example that demonstrates starting the HDL simulator from MATLAB, see Verify HDL Module with MATLAB Testbench.
Start Cadence Xcelium from MATLAB. To start the Cadence Xcelium simulator from MATLAB, at the MATLAB command prompt, enter:
nclaunch('PropertyName', 'PropertyValue', ...)
This example changes the folder location to VHDLproj
and then opens Xcelium. Because the command line omits the
'hdlsimdir' and 'startupfile'
properties, nclaunch creates a temporary file. The
'tclstart' property specifies Tcl commands that load
and initialize the HDL simulator for testbench instance
modsimrand.
cd VHDLproj nclaunch('tclstart',... 'hdlsimmatlab modsimrand; matlabtb modsimrand 10 ns -socket 4449')
This example changes the folder location to VHDLproj
and then opens Xcelium. Because the function call omits the
'hdlsimdir' and 'startupfile'
properties, nclaunch creates a temporary file. The
'tclstart' property specifies a Tcl command that
loads the VHDL® entity parse in library
work for cosimulation between
nclaunch and Simulink. The 'socketsimulink' property specifies
TCP/IP socket communication on the same computer, using port 4449.
cd VHDLproj nclaunch('tclstart', 'hdlsimulink work.parse', 'socketsimulink', '4449')
Start Siemens ModelSim from MATLAB. To start the Siemens ModelSim HDL simulator from MATLAB, at the MATLAB command prompt, enter:
vsim('PropertyName','PropertyValue', ...)
This example changes the folder location to VHDLproj
and then opens ModelSim. Because the vsim call omits the
'vsimdir' and 'startupfile'
properties, the function creates a temporary DO file. The
'tclstart' property specifies Tcl commands that load
and initialize the HDL simulator for testbench instance
modsimrand.
cd VHDLproj vsim('tclstart','vsimmatlab modsimrand; matlabtb modsimrand 10 ns -socket 4449')
This example changes the folder location to VHDLproj
and then opens ModelSim. Because the vsim call omits the
'vsimdir' and 'startupfile'
properties, vsim creates a temporary DO file. The
'tclstart' property specifies a Tcl command that
loads the VHDL entity parse in library
work for cosimulation between vsim
and Simulink. The 'socketsimulink' property specifies
TCP/IP socket communication on the same computer, using socket port 4449.
cd VHDLproj vsim('tclstart','vsimulink work.parse','socketsimulink','4449')
This example includes Tcl commands that run HDL compilation and simulation when the ModelSim software starts up.
vsim('tclstart',{'vlib work','vlog +acc clocked_inverter.v hdl_top.v','vsim +acc hdl_top'});
This example loads the hdl_top module for Simulink cosimulation. The vsimulink command also
specifies socket number 5678 for communication with HDL
Cosimulation blocks in Simulink models, and specifies an HDL time precision of 10 ps.
Specifying the socket this way is equivalent to using the
socketsimulink property of the
vsim function.
vsim('tclstart', … {'vlib work', 'vlog -voptargs=+acc clocked_inverter.v hdl_top.v', … 'vsimulink hdl_top -socket 5678 -t 10ps'});
Start Synopsys VCS from MATLAB. To start the Synopsys VCS simulator from MATLAB, at the MATLAB command prompt, enter:
launchVCS(PropertyName=PropertyValue, ...)
When the LinkType is Simulink, you must add an HDL
Cosimulation block for use with Synopsys
VCS to the Simulink canvas before you run the above command.
This example compiles and starts a single-file Verilog® design for cosimulation with Simulink, and then opens VCS.
launchVCS( ... VerilogFiles="myinverter.v", ... HDLTopLevelName="myinverter", ... LinkType="Simulink");
This example compiles and starts a VHDL design in batch mode. In batch mode, the VCS simulator exits after the simulation completes. This example
restarts the simulation by calling launchVCS again with
the SkipScriptGeneration and
SkipCompilation arguments.
coreLaunchArgs={"VHDLFiles",["foo1.vhd","foo2.vhd"],"HDLTopLevelName","top","RunMode","batch" };
launchVCS(...
coreLaunchArgs{:},...
"SkipScriptGeneration", true,...
"SkipCompilation", true...
);Start the HDL Simulator from a Shell
When you start the HDL simulator from a shell, you must first create a Tcl setup file for the HDL simulator. The setup file includes the location of the specified cosimulation libraries for MATLAB and Simulink. You can then include this file when you start your HDL simulator.
For more information on cosimulation libraries, see Cosimulation Libraries.
After you have created your Tcl setup file, you can edit it to add compilation and execution commands.
Start Cadence Xcelium from a Shell. Generate a setup file by using the nclaunch function at the
MATLAB prompt.
nclaunch('starthdlsim','no','startupfile','cosim_procdefs.tcl','tclstart',{''})
This creates a Tcl setup file named cosim_procdefs.tcl,
which contains definitions for functions that enable cosimulation with
MATLAB or Simulink.
Now, load this generated setup file when you start Xcelium. In a shell prompt, enter the following.
xmsim design_name -64bit -input setupfile
Where design_namesetupfilecosim_procdefs.tcl in this
example, or compile_and_launch.tcl by default). For an
example that uses a Tcl setup file, see Cosimulation for Testing Filter Component Using MATLAB Testbench.
Once the simulator is launched, use the hdlsimmatlab function to
load the HDL module, and the matlabtb or matlabcp function to connect
to a MATLAB function. For example, to compile and launch Xcelium enter the following commands in a shell (assuming the Tcl
script is named cosim_procdefs.tcl).
xmvlog -64bit cosim_lowpass_filter.v xmelab -64bit -access +wc cosim_lowpass_filter xmsim cosim_lowpass_filter -64bit -input cosim_procdefs.tcl
Then in Xcelium enter:
matlabtb cosim_lowpass_filter 10ns -repeat 10ns -mfunc cosim_lowpass_filtertb force cosim_lowpass_filter.clk_enable 1 -after 0ns force cosim_lowpass_filter.reset 1 -after 0ns 0 -after 22ns force cosim_lowpass_filter.clk 1 -after 0ns 0 -after 5ns -repeat 10ns deposit cosim_lowpass_filter.filter_in 0 run 10000ns
Start Siemens ModelSim from a Shell. Generate a setup file by using the vsim function at the
MATLAB prompt.
vsim('startms','no','startupfile','cosim_procdefs.tcl')
This creates a Tcl setup file named cosim_procdefs.tcl,
which contains definitions for functions that enable cosimulation with
MATLAB or Simulink.
Now, use this generated configuration file when you Start the HDL Simulator from a Shell.
Now, load this generated setup file when you start ModelSim. In a shell prompt, enter the following.
vsim design_name -do setupfile
setupfile is the name of the Tcl setup file
(cosim_procdefs.tcl in this example, or
compile_and_launch.tcl by default). When you include
the design_name argument, the
vsim call also starts the simulation.
The configuration file defines the -foreign option to
vsim. This option loads the HDL Verifier shared library and specifies its entry point. You can also
specify any other existing configuration files you are using.
If you do not use the generated configuration file, you can load the
client shared library and specify its entry point by executing
vsim with a command like this:
vsim design_name -foreign "matlabclient /path/library"
where path is the path to the HDL Verifier cosimulation library. See Cosimulation Libraries to find the applicable library name for your machine. For an example that
uses a Tcl configuration file, see Cosimulation for Testing Filter Component Using MATLAB Testbench.
Note
You can also call this command from inside the HDL simulator.
Once the simulator is launched, use the vsimmatlab function to load
the HDL module, and the matlabtb or matlabcp function to connect
to a MATLAB function. For example, to compile and launch ModelSim enter the following commands in a shell (assuming the Tcl
script is named
cosim_procdefs.tcl):
vlib work vlog cosim_lowpass_filter.v vsim -c -do cosim_procdefs.tcl
vsimmatlab work.cosim_lowpass_filter matlabtb cosim_lowpass_filter 10ns -repeat 10ns -mfunc cosim_lowpass_filtertb.m force clk_enable 1 0 force reset 1 0, 0 25 force clk 1 0, 0 5 -repeat 10 run 10000ns
Start Synopsys VCS from a Shell. The scripts set up the GCC environment and load the correct HDL Verifier library into the Synopsys VCS simulator.
To generate custom scripts, use launchVCS to generate
a shell script template (.bash). Then, perform one of the
following actions:
Modify the template and run it from the MATLAB command prompt by using a
systemcommand.Invoke the script directly from a shell.
In batch mode, the function returns only after launching and starting the HDL simulator. In interactive mode, the function returns without waiting for the HDL simulator to start.
Generate the HDL compilation script and VCS simulator launch script by using the launchVCS function at the MATLAB prompt.
launchVCS(VerilogFiles= "rcosflt_rtl.v", ... HDLTopLevelName= "rcosflt_rtl", ... RunMode= "cli");
This creates a compilation script named
cosimVCS.compile.bash and a launch script named
cosimVCS.launch.bash. These scripts set up the GCC
environment and load the correct HDL Verifier library into the VCS simulator.
The "cli" value for the RunMode
argument starts the VCS simulator in an interactive shell. Now, load the generated
launch script directly from a shell. In a shell prompt, enter the
following.
!bash cosimVCS.launch.bash
Cosimulation Libraries
It is recommended to use the same compiler for all libraries linked into the same executable. HDL Verifier versions of the library for the compilers that the HDL simulators support. Using the same libraries helps the cosimulation software stay compatible with other C++ libraries that you might link into the HDL simulator, including SystemC libraries.
If any of these conditions apply, choose the version of the HDL Verifier library that matches the compiler used for that code:
You link other third-party applications into your HDL simulator.
You compile and link SystemC code as part of your design or testbench.
You link custom C/C++ applications into your HDL simulator.
If you do not link any other code into your HDL simulator, you can use any version
of the supplied libraries. The function for opening the HDL simulator
(nclaunch, vsim, or
launchVCS) chooses a default version of this
library.
For examples on specifying HDL Verifier libraries when cosimulating across a network, see Cross-Network Cosimulation.
Library Naming Format
The HDL Verifier cosimulation libraries use the following naming format:
edalink/extensions/{version}/{arch}/lib{version_short_name}{client_server_tag}_{compiler_tag).{libext}
For the VCS simulator, use the GCCVersion argument of the launchVCS function to specify the library name.
| Argument | Xcelium Values | ModelSim/Questa™ Values |
|---|---|---|
version | incisive | modelsim |
arch | linux64 | linux64, windows32, or
windows64 |
version_short_name |
lfihdl | lfmhdl |
client_server_tag | MATLAB: cSimulink: s | MATLAB: cSimulink: s |
compiler_tag | gcc48, gcc63,
tmwgcc | Linux: Note gcc740vc15 or gcc421vc12 requires Visual Studio® 2013 redistribute, available from Microsoft®. |
libext | so | dll or so
|
For more on MATLAB build compilers, see MATLAB Build Compilers.
Default Libraries
The HDL Verifier scripts support the use of libraries compiled with versions of GCC supplied by the HDL tool vendors. The table lists the libraries shipped with HDL Verifier for each supported HDL simulator.
The default library is tmwgcc or tmwvs
versions. Specify an alternative with the libfile argument to
vsim or nclaunch.
Cadence Xcelium Libraries
| Platform | MATLAB Library | Simulink Library |
|---|---|---|
| Linux 64 |
|
|
Siemens ModelSim and Questa Libraries
| Platform | MATLAB Library | Simulink Library |
|---|---|---|
| Linux 64 |
|
|
| Windows 32 |
|
|
| Windows 64 | liblfmhdlc_tmwvs.dll (default)
liblfmhdlc_gcc740vc15.dll | liblfmhdls_tmwvs.dll
(default)liblfmhdls_gcc740vc15.dll |
Alternative HDL Simulator Libraries
You can use a different HDL-side library by specifying the
libfile name-value pair when you call the nclaunch or vsim function. Choose the
version of the library that matches the compiler and system libraries you are
using for any other C/C++ libraries linked into the HDL simulator. Depending on
the version of your HDL simulator, you might need to explicitly set additional
paths in the LD_LIBRARY_PATH environment variable.
For example, to use a nondefault library:
Copy the system libraries from the MATLAB installation to the machine with the HDL simulator. The system libraries are installed in
matlabroot/sys/osModify the
LD_LIBRARY_PATHenvironment variable to add the path to the copied system libraries.
Specify Alternate Library Using
nclaunch. This example shows library settings for an HDL simulation that links in a
custom C++ application, compiled with gcc44. Therefore,
the simulator must use the cosimulation libraries compiled with
gcc44, instead of using the default library. Both
MATLAB and Xcelium are running on the same 64-bit Linux machine.
Modify the PATH variable so that the
nclaunch function finds the desired version of the
HDL simulator. Then, specify the library name with the
libfile name-value pair. At the MATLAB command prompt, type:
currPath = getenv('PATH'); setenv('PATH',['/tools/IUS-1110/bin:' currPath]); nclaunch('tclstart',{'exec xmvhdl -64bit inverter.vhd', ... 'exec xmelab -64bit -access +rwc inverter', ... 'hdlsimulink -gui inverter' }, ... 'libfile','liblfihdls_gcc48');
Verify the library resolution using ldd from within the
xmsim console.
exec ldd /path/to/matlab/toolbox/edalink/extensions/incisive/linux64/liblfihdls_gcc48.so
linux-vdso.so.1 => (0x00007fff2ffff000)
libpthread.so.0 => /lib/x86_64-linux-gnu/libpthread.so.0 (0x00007f98361a0000)
libstdc++.so.6 => /usr/lib/x86_64-linux-gnu/libstdc++.so.6 (0x00007f9835e99000)
libm.so.6 => /lib/x86_64-linux-gnu/libm.so.6 (0x00007f9835c16000)
libgcc_s.so.1 => /lib/x86_64-linux-gnu/libgcc_s.so.1 (0x00007f9835a00000)
libc.so.6 => /lib/x86_64-linux-gnu/libc.so.6 (0x00007f9835676000)
/lib64/ld-linux-x86-64.so.2 (0x00007f983661c000)
Specify Alternate Library for Xcelium Using System Shell. This example shows how to start Xcelium with an explicit option to specify the cosimulation library. You can start Xcelium from a system shell on the same machine as MATLAB, on a different machine, or on a machine with a different operating system.
This example code runs on a 64-bit Linux version of Xcelium. It does not matter what machine MATLAB is running on. Instead of using the default library in the Xcelium distribution, this example uses the library compiled with GCC 4.4.
Modify the PATH variable to point to the desired
version of the HDL simulator. Although xmsim finds any
GCC libraries in the installation, this example changes the
LD_LIBRARY_PATH to show how to use a custom
installation of GCC. In a csh-compatible system shell, enter:
setenv PATH /tools/ius/lnx/tools/bin/64bit:${PATH}
setenv LD_LIBRARY_PATH /tools/ius/lnx/tools/systemc/gcc/4.4-x86_64/install/lib64:${LD_LIBRARY_PATH}
xmvhdl -64bit inverter.vhd
xmelab -64bit -access +rwc inverter
xmsim -tcl -loadvpi /tools/matlab/toolbox/edalink/extensions/incisive/linux64/liblfihdlc_gcc48:matlabclient inverter.vhd
You can check the library resolution using ldd, as in
the previous example.
Specify Alternate Library Using vsim. This example shows library settings for an HDL simulation that uses some
SystemC applications, compiled with gcc450. You can
download this version of GCC with its associated system libraries from
Siemens. Therefore, the simulator must use the cosimulation libraries
compiled with gcc450, instead of using the default
library. Both MATLAB and ModelSim are running on the same 64-bit Linux machine.
Modify the PATH variable so that the
vsim function finds the desired version of the HDL
simulator. Modify theLD_LIBRARY_PATH because the HDL
simulator does not add the path to the system libraries. Then, specify the
library name with the libfile name-value pair. At the
MATLAB command prompt, type:
currPath = getenv('PATH'); currLdPath = getenv('LD_LIBRARY_PATH'); setenv('PATH',['/tools/modelsim-10.1c/bin:' currPath]); setenv('LD_LIBRARY_PATH',['/tools/modelsim-10.1c/gcc-4.5.0-linux/lib:' currLdPath]); vsim('tclstart',{'vlib work','vcom inverter.vhd','vsimulink inverter'}, ... 'libfile','liblfmhdls_gcc450');
Verify the library resolution using ldd from within the
vsim GUI.
exec ldd /path/to/matlab/toolbox/edalink/extensions/modelsim/linux64/liblfmhdls_gcc450.so
linux-vdso.so.1 => (0x00007fff06652000)
libpthread.so.0 => /lib/x86_64-linux-gnu/libpthread.so.0 (0x00007f505083d000)
libstdc++.so.6 => /usr/lib/x86_64-linux-gnu/libstdc++.so.6 (0x00007f5050536000)
libm.so.6 => /lib/x86_64-linux-gnu/libm.so.6 (0x00007f50502b3000)
libgcc_s.so.1 => /lib/x86_64-linux-gnu/libgcc_s.so.1 (0x00007f505009d000)
libc.so.6 => /lib/x86_64-linux-gnu/libc.so.6 (0x00007f504fd13000)
/lib64/ld-linux-x86-64.so.2 (0x00007f5050cb8000)
Specify Alternate ModelSim Library Using System Shell. This example shows how to start ModelSim with an explicit option to specify the cosimulation library. You can start ModelSim from a system shell on the same machine as MATLAB, on a different machine, or on a machine with a different operating system.
This example code runs on a 64-bit Linux version of ModelSim. It does not matter what machine MATLAB is running on. Instead of using the default library in the ModelSim distribution, this example uses the library compiled with GCC 4.5.0. You can download this version of GCC with its associated system libraries from Siemens.
Modify the PATH variable to point to the desired
version of the HDL simulator. Modify theLD_LIBRARY_PATH
because the HDL simulator does not add the path to the system libraries,
unless you saved the GCC at the root of the ModelSim installation. In a csh-compatible system shell, enter:
setenv PATH /tools/questasim/bin:${PATH}
setenv LD_LIBRARY_PATH /tools/mtigcc/gcc-4.5.0-linux_x86_64/lib64:${LD_LIBRARY_PATH}
setenv MTI_VCO_MODE 64
vlib work
vcom +acc+inverter inverter.vhd
vsim +acc+inverter -foreign \
"matlabclient /tools/matlab/toolbox/edalink/extensions/modelsim/linux64/liblfmhdlc_gcc450.so" \
work.inverterYou can check the library resolution using ldd, as in
the previous example.