估计过程模型
使用实时编辑器在时域或频域中估计单输入单输出 (SISO) 系统的连续时间过程模型
说明
通过 Estimate Process Model 任务,您可以通过交互方式估计和验证 SISO 系统的过程模型。您可以定义和改变模型结构,并指定可选参数,例如初始条件处理和搜索方法。该任务会自动为您的实时脚本生成 MATLAB® 代码。有关 Live Editor 任务总体情况的详细信息,请参阅将交互式任务添加到实时脚本中。
过程模型是描述线性系统动态特性的简单连续时间传递函数。过程模型元素包括静态增益、时间常数、时间延迟、积分器和过程零点。
过程模型常用于描述众多行业的系统动态特性,并适用于各种生产环境。这些模型的优点是简单、支持传输延迟估计,模型系数易于解释为极点和零点。有关过程模型估计的详细信息,请参阅What Is a Process Model?
Estimate Process Model 任务独立于更通用的系统辨识。当您想要计算和比较多个模型结构的估计值时,请使用系统辨识。
首先,将包含输入和输出数目据的试验数据加载到您的 MATLAB 工作区中,再将该数据导入到任务中。然后,选择一个要估计的模型结构。该任务为您提供控制和绘图,帮助您试验不同的模型结构并比较每个模型的输出与测量值的拟合度。
打开任务
要将 Estimate Process Model 任务添加到 MATLAB 编辑器中的实时脚本,请执行以下操作:
在 Live Editor 选项卡上,选择 Task > Estimate Process Model。
在脚本的代码块中,键入相关关键字,例如
process或estimate。从建议的命令自动填充项中选择 Estimate Process Model。
示例
使用 Estimate Process Model Live Editor 任务来估计过程模型,并将模型输出与测量数据进行比较。
设置数据
将测量数据 tt1 加载到您的 MATLAB 工作区中。tt1 是一个时间表,其中包含一个输入变量 u 和一个输出变量 y。
load sdata1 tt1
将数据导入任务
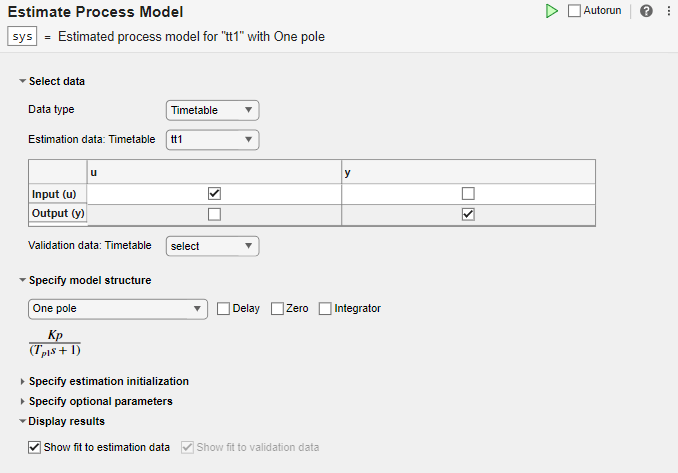
在 Select data 部分中,将 Data type 设置为 Timetable,并将 Estimation data 设置为 tt1。
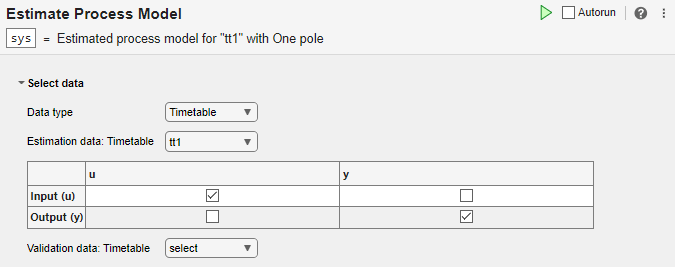
该任务显示一个包含 tt1 输入和输出变量名称的表。
使用默认设置估计模型
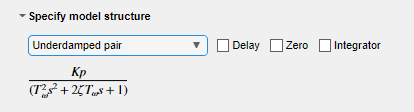
检查模型结构和可选参数。
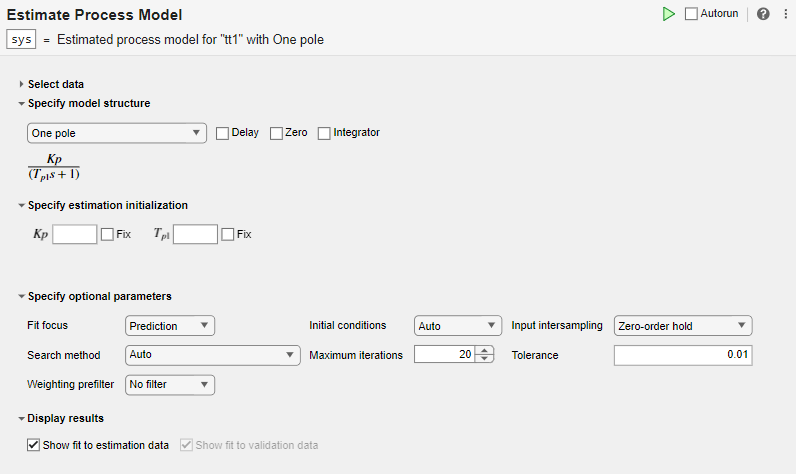
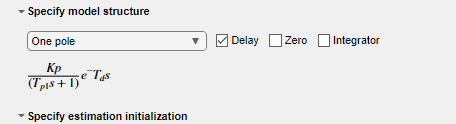
在 Specify model structure 部分,默认选项是 One Pole,且不选中 Delay、Zero 或 Integrator。本节中参数下面的方程显示了指定的结构。
在 Specify estimation initialization 部分,与模型结构中的参数匹配的初始化参数允许您设置估计的起点。如果您选择 Fix,则参数将保持固定为您指定的值。对于此示例,不要指定初始化。该任务然后任务使用默认值作为起点。
在 Specify optional parameters 部分,设置过程估计的默认选项。
通过点击绿色箭头,从 Live Editor 选项卡执行任务。您还可以选择 Autorun,以便在每次更新参数时自动运行任务。
![]()
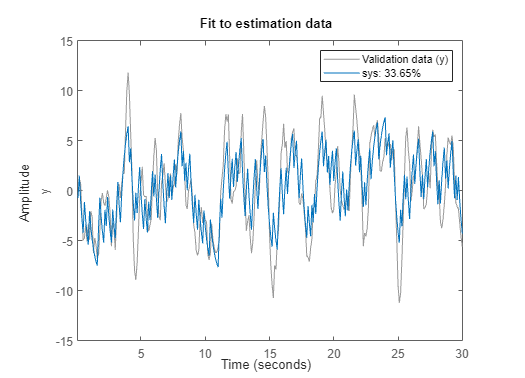
下图显示估计数据、估计模型输出和拟合百分比。
使用参数设置进行试验
使用参数设置进行试验并观察它们如何影响拟合度。
例如,向 One Pole 结构中添加延迟并运行任务。
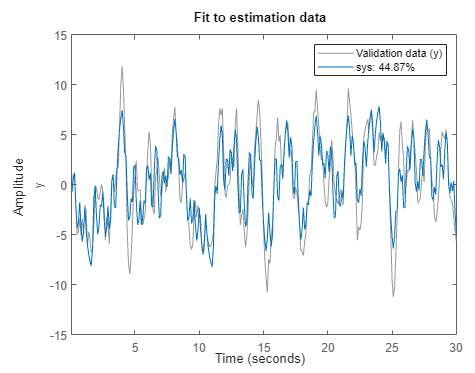
尽管拟合度百分比仍低于 50%,但估计拟合度有所改善。
尝试不同的模型结构。在 Specify model structure 中,选择 Underdamped Pair 但不选中 Delay,并运行任务。
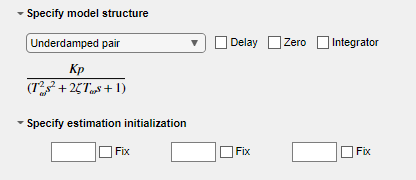
拟合结果明显改善。
生成代码
要显示任务生成的代码,请点击参数部分底部的 ![]() 。您看到的代码反映了任务的当前参数配置。
。您看到的代码反映了任务的当前参数配置。
使用单独的估计和验证数据,以便您可以验证估计的过程模型。
设置数据
将测量数据 sdata1 加载到您的 MATLAB 工作区并检查其内容。
load sdata1 umat1 ymat1 Ts
将数据分成两组,一半用于估计,一半用于验证。原始数据集有 300 个采样,因此,每个新数据集有 150 个采样。
u_est = umat1(1:150); u_val = umat1(151:300); y_est = ymat1(1:150); y_val = ymat1(151:300); Ts
Ts = 0.1000
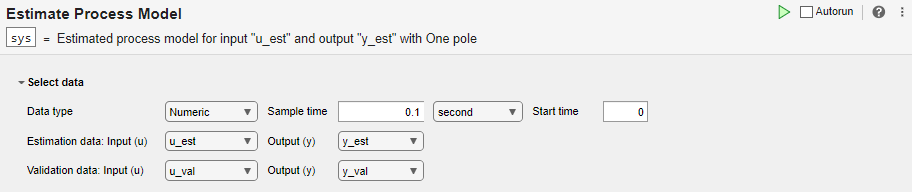
将数据导入任务
在 Select data 部分中,将 Data type 设置为 Numeric。将采样时间设置为 0.1 秒。选择适当的数据集进行估计和验证。
估计和验证模型
示例使用实时编辑器任务评估过程模型使用模型结构 Underdamped Pair 实现了最佳结果。对于此示例,选择相同的选项。
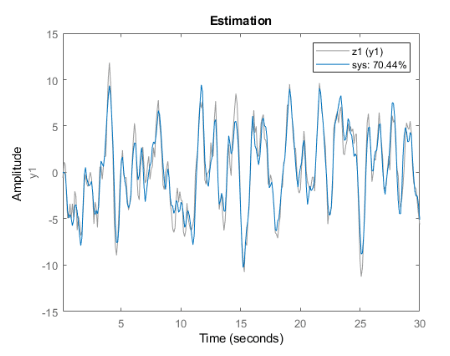
执行任务。执行任务会创建两个图。第一个图显示估计结果,第二个图显示验证结果。
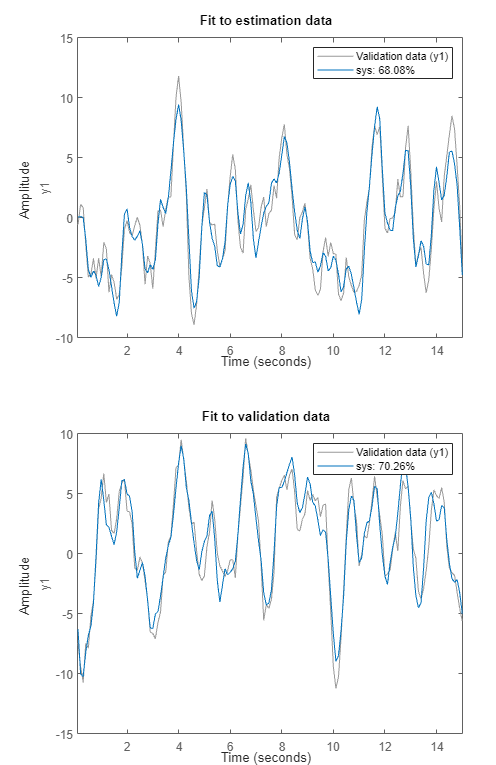
对估计数据的拟合度比使用实时编辑器任务评估过程模型略差。当前示例中的估计只使用了一半的数据来估计模型。对验证数据的拟合度更能体现模型的优良率,因此优于对估计数据的拟合度。