bfscore
Contour matching score for image segmentation
Syntax
Description
score = bfscore(prediction,groundTruth)prediction and the true segmentation in
groundTruth. prediction and
groundTruth can be a pair of logical arrays for binary
segmentation, or a pair of label or categorical arrays for multiclass
segmentation.
[
also returns the precision and recall values for the score,precision,recall] = bfscore(prediction,groundTruth)prediction
image compared to the groundTruth image.
[___] = bfscore(
computes the BF score using a specified threshold as the distance error tolerance,
to decide whether a boundary point has a match or not.prediction,groundTruth,threshold)
Examples
Read an image with an object to segment. Convert the image to grayscale, and display the result.
A = imread('hands1.jpg'); I = im2gray(A); figure imshow(I) title('Original Image')
Use the active contours (snakes) method to segment the hand.
mask = false(size(I)); mask(25:end-25,25:end-25) = true; BW = activecontour(I, mask, 300);
Read the ground truth segmentation.
BW_groundTruth = imread('hands1-mask.png');Compute the BF score of the active contours segmentation against the ground truth.
similarity = bfscore(BW, BW_groundTruth);
Display the masks on top of each other. Colors indicate differences in the masks.
figure
imshowpair(BW, BW_groundTruth)
title(['BF Score = ' num2str(similarity)])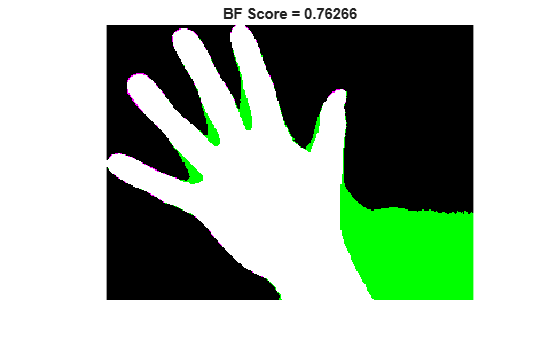
This example shows how to segment an image into multiple regions. The example then computes the BF score for each region.
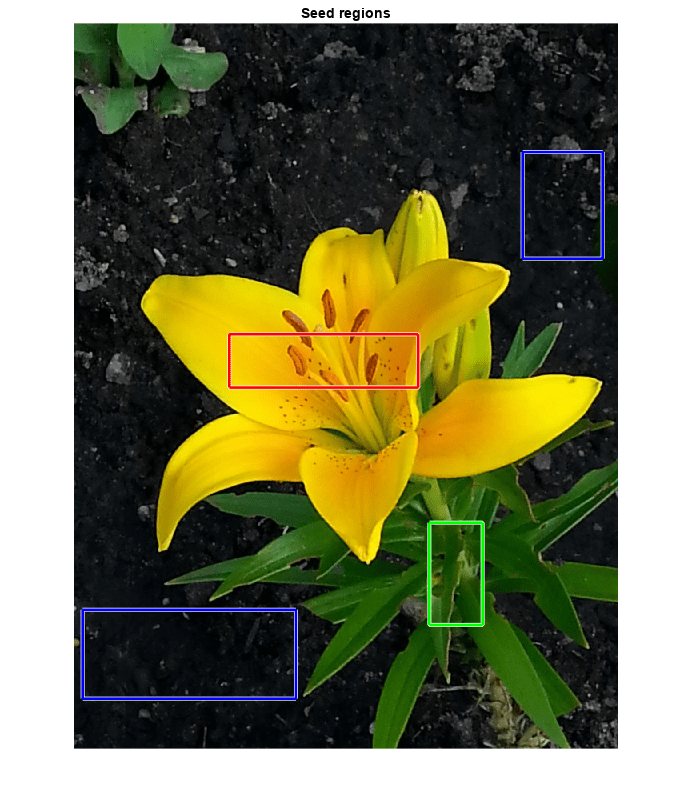
Read an image with several regions to segment.
RGB = imread('yellowlily.jpg');Create scribbles for three regions that distinguish their typical color characteristics. The first region classifies the yellow flower. The second region classifies the green stem and leaves. The last region classifies the brown dirt in two separate patches of the image. Regions are specified by a 4-element vector, whose elements indicate the x- and y-coordinate of the upper left corner of the ROI, the width of the ROI, and the height of the ROI.
region1 = [350 700 425 120]; % [x y w h] format
BW1 = false(size(RGB,1),size(RGB,2));
BW1(region1(2):region1(2)+region1(4),region1(1):region1(1)+region1(3)) = true;
region2 = [800 1124 120 230];
BW2 = false(size(RGB,1),size(RGB,2));
BW2(region2(2):region2(2)+region2(4),region2(1):region2(1)+region2(3)) = true;
region3 = [20 1320 480 200; 1010 290 180 240];
BW3 = false(size(RGB,1),size(RGB,2));
BW3(region3(1,2):region3(1,2)+region3(1,4),region3(1,1):region3(1,1)+region3(1,3)) = true;
BW3(region3(2,2):region3(2,2)+region3(2,4),region3(2,1):region3(2,1)+region3(2,3)) = true;Display the seed regions on top of the image.
figure imshow(RGB) hold on visboundaries(BW1,'Color','r'); visboundaries(BW2,'Color','g'); visboundaries(BW3,'Color','b'); title('Seed regions')
Segment the image into three regions using geodesic distance-based color segmentation.
L = imseggeodesic(RGB,BW1,BW2,BW3,'AdaptiveChannelWeighting',true);Load a ground truth segmentation of the image.
L_groundTruth = double(imread('yellowlily-segmented.png'));Visually compare the segmentation results with the ground truth.
figure imshowpair(label2rgb(L),label2rgb(L_groundTruth),'montage') title('Comparison of Segmentation Results (Left) and Ground Truth (Right)')
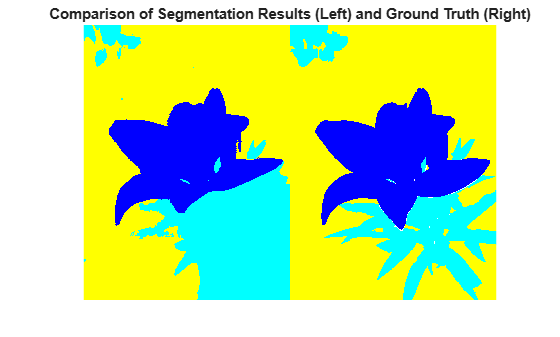
Compute the BF score for each segmented region.
similarity = bfscore(L, L_groundTruth)
similarity = 3×1
0.7992
0.5333
0.7466
The BF score is noticeably smaller for the second region. This result is consistent with the visual comparison of the segmentation results, which erroneously classifies the dirt in the lower right corner of the image as leaves.
Input Arguments
Output Arguments
More About
References
[1] Csurka, G., D. Larlus, and F. Perronnin. "What is a good evaluation measure for semantic segmentation?" Proceedings of the British Machine Vision Conference, 2013, pp. 32.1-32.11.