bboxLidarToCamera
Estimate 2-D bounding box in camera frame using 3-D bounding box in lidar frame
Syntax
Description
bboxesCamera = bboxLidarToCamera(bboxesLidar,intrinsics,tform)bboxesLidar. The function uses the camera intrinsic parameters
intrinsics and a lidar to camera transformation matrix
tform.
bboxesCamera = bboxLidarToCamera(bboxesLidar,intrinsics,tform,L)L. L is the corresponding labeled 2-D image of
the 2-D bounding boxes, where the objects are labeled distinctively.
[
indicates for which of the specified 3-D bounding boxes the function detects a corresponding
2-D bounding box in the camera frame.bboxesCamera,boxesUsed] = bboxLidarToCamera(___)
[___] = bboxLidarToCamera(___,'ProjectedCuboid',true)
returns 3-D projected cuboids instead of 2-D bounding boxes.
Examples
Load data from a MAT file into the workspace.
ld = load("bboxData.mat");Extract the image, point cloud, and camera intrinsics.
I = ld.I; ptCloud = ld.ptCloud; intrinsics = ld.intrinsics;
Extract one of the 3-D bounding boxes to project from the point cloud to the image.
bboxLidar = ld.bboxPtCloud(1,:);
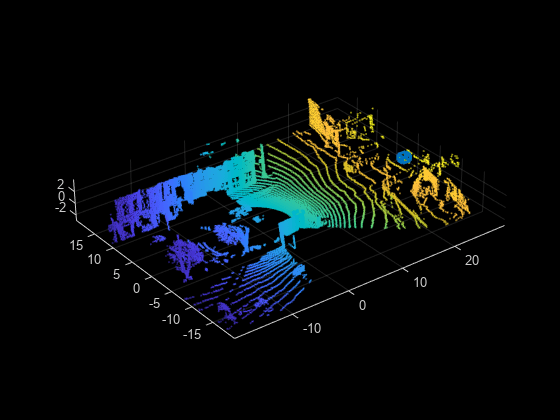
Display the 3-D bounding box overlaid on the point cloud.
figure pcshow(ptCloud) showShape("cuboid",bboxLidar,LineWidth=1,Color="white")
Estimate the projection of the 3-D bounding box in the image using the transformation from the lidar sensor to the camera.
lidarToCameraTform = ld.lidarToCameraTform; bboxesImage = bboxLidarToCamera(bboxLidar,intrinsics,lidarToCameraTform);
Undistort the image using the camera intrinsics.
I = undistortImage(I,intrinsics);
Display the 2-D bounding box annotated in the image.
Iannotated = insertObjectAnnotation(I,"rectangle",bboxesImage,"Vehicle"); figure imshow(Iannotated)

Load data from a MAT file into the workspace.
ld = load("bboxData.mat");Extract the image, point cloud, and camera intrinsics.
I = ld.I; ptCloud = ld.ptCloud; intrinsics = ld.intrinsics;
Extract one of the 3-D bounding boxes to project from the point cloud to the image.
bboxPtCloud = ld.bboxPtCloud(2,:);
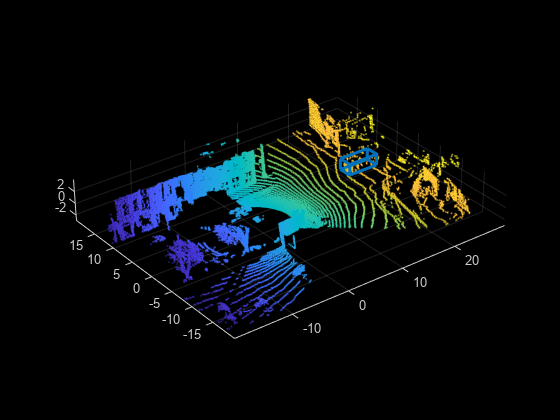
Display the 3-D bounding box overlaid on the point cloud.
figure pcshow(ptCloud) showShape("cuboid",bboxPtCloud,Color="white")
Use the fuseCameraToLidar function with the transformation from the camera to the lidar sensor to get a point cloud of the points within the field of view of the camera.
cameraToLidarTform = ld.cameraToLidarTform; cameraFOVPtCloud = fuseCameraToLidar(I,ptCloud,intrinsics,cameraToLidarTform);
Use the findPointsInModel function of the cuboidModel object to verify that the object enclosed by the point cloud bounding box is in the image.
model = cuboidModel(bboxPtCloud); indices = findPointsInModel(model,cameraFOVPtCloud); isObjectInImage = ~isempty(indices)
isObjectInImage = logical
1
Visualize the point cloud of the field of view of the camera with the color from the image and the 3-D bounding box.
figure pcshow(cameraFOVPtCloud,MarkerSize=30) showShape("cuboid",bboxPtCloud,Color="white")

Estimate the projection of the 3-D bounding box in the image using the transformation from the lidar sensor to the camera.
lidarToCameraTform = ld.lidarToCameraTform; bboxesImage = bboxLidarToCamera(bboxPtCloud,intrinsics,lidarToCameraTform,ProjectedCuboid=true);
Undistort the image using the camera intrinsics.
I = undistortImage(I,intrinsics);
Annotate the image to display the projected cuboid overlaid on the image.
Iannotated = insertObjectAnnotation(I,"projected-cuboid",bboxesImage,"Vehicle"); figure imshow(Iannotated)

Input Arguments
3-D bounding boxes in the lidar frame, specified as a cuboidModel
object or an N-by-9 matrix of real values. N is
the number of 3-D bounding boxes. Each row of the matrix has the form
[xctr
yctr
zctr
xlen
ylen
zlen
xrot
yrot
zrot].
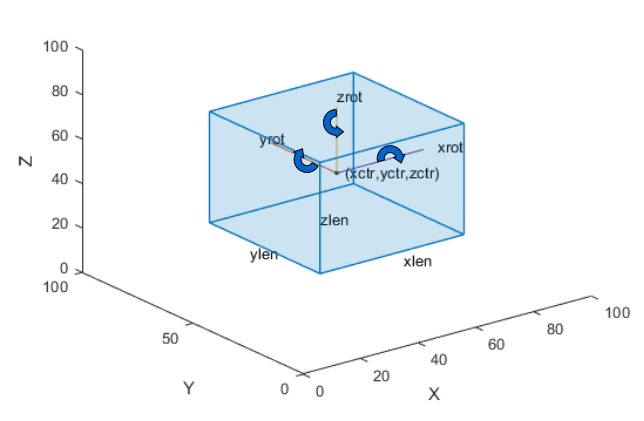
xctr, yctr, and zctr — These values specify the x-, y-, and z-axis coordinates, respectively, of the center of the cuboid bounding box.
xlen, ylen, and zlen — These values specify the length of the cuboid along the x-, y-, and z-axis, respectively, before it is rotated.
xrot, yrot, and zrot — These values specify the rotation angles of the cuboid around the x-, y-, and z-axis, respectively. These angles are clockwise-positive when you look in the forward direction of their corresponding axes.
This figure shows how these values determine the position of a cuboid.
Note
The function assumes that the point cloud data that corresponds to the 3-D bounding boxes and the image data are time synchronized.
Data Types: single | double
Camera intrinsic parameters, specified as a cameraIntrinsics object.
Camera to lidar rigid transformation, specified as a rigidtform3d
object.
Labeled 2-D image, specified as a matrix of real values. The matrix size is the same
as the ImageSize property of intrinsics.
Note
Labeled images are assumed to be undistorted.
Data Types: single | double | int8 | int16 | uint8 | uint16