estimateBoardCornersCamera
Estimate corners of calibration board in camera frame
Since R2026a. Replaces estimateCheckerboardCorners3d.
Syntax
Description
Estimate corners of a checkerboard, ChArUco board, AprilGrid, or a board with a custom calibration pattern in the camera frame.
Supported Calibration Patterns
cornersCamera = estimateBoardCornersCamera("checkerboard",imagePoints,intrinsics,patternDims,squareSize)imagePoints, camera intrinsics, intrinsics,
the pattern’s dimensions, patternDims, and the pattern's square size,
squareSize.
cornersCamera = estimateBoardCornersCamera("charuco-board",imagePoints,intrinsics,patternDims,checkerSize)checkerSize.
cornersCamera = estimateBoardCornersCamera("aprilgrid",imagePoints,intrinsics,patternDims,tagSize,tagSpacing)tagSize, and tag spacing.
[
additionally returns the board size cornersCamera,boardSize] = estimateBoardCornersCamera(___)boardSize.
[___] = estimateBoardCornersCamera(___,Padding=
specifies the padding along each side of the board.padding)
Custom Calibration Patterns
cornersCamera = estimateBoardCornersCamera(imagePoints,worldPoints,intrinsics,originDistance,boardSize)imagePoints,
world points worldPoints, camera intrinsics
intrinsics, origin distance originDistance,
and board size boardSize.
Examples
Load an image containing a checkerboard pattern into the workspace.
I = imread(fullfile(toolboxdir("lidar"),"lidardata","calibration","images","01.png"));
Load the camera intrinsics from a previously saved mat file.
cameraIntrinsicFile = fullfile(toolboxdir("lidar"),"lidardata","calibration","images","intrinsics.mat"); intrinsics = load(cameraIntrinsicFile).intrinsics;
Disable the warning for symmetric board usage. While symmetric boards are not recommended, the uniform padding in this case ensures symmetry does not affect the results.
currentState = warning; warning("off","vision:calibrate:boardShouldBeAsymmetric")
Detect the checkerboard points.
[imagePoints,patternDims] = detectCheckerboardPoints(I,PartialDetections=false);
Restore the original warning state.
warning(currentState)
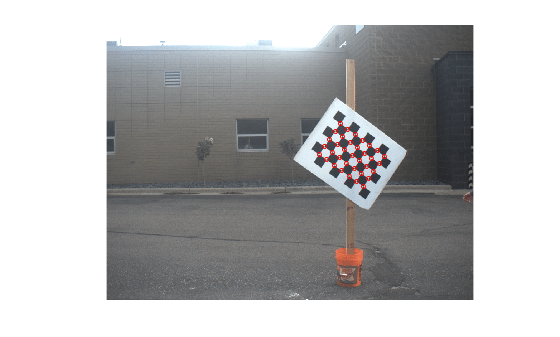
Visualize the detected checkerboard points.
figure imshow(I) hold on plot(imagePoints(:,1),imagePoints(:,2),"ro",MarkerSize=3)
Specify the size of the checkerboard squares in millimeters.
squareSize = 100;
Specify the padding of the board in millimeters.
padding = [100 100 100 100];
Estimate the board corners in the camera frame.
cornersCamera = estimateBoardCornersCamera("checkerboard",imagePoints,... intrinsics,patternDims,squareSize,Padding=padding);
Undistort image for visualization.
J = undistortImage(I,intrinsics);
Project the corner points to the image.
cornersImage = projectLidarPointsOnImage(cornersCamera,intrinsics,rigidtform3d);
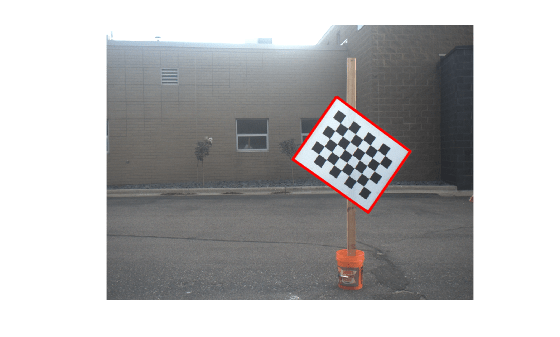
Visualize the estimated board corners in the undistorted image.
figure imshow(J) hold on showShape("polygon",cornersImage,Color="red",LineWidth=2)
Load an image containing an AprilGrid board into the workspace.
I = imread("AprilGridCalibrationBoardImage.jpg");Load the camera intrinsics from a previously saved mat file.
intrinsics = load("intrinsics.mat").intrinsics;Define the parameters for AprilGrid detection.
patternDims = [8 11];
markerFamily = "tag36h11";
minTagId = 300;Detect AprilGrid points in the image.
imagePoints = detectAprilGridPoints(I,patternDims,markerFamily,MinTagID=minTagId);
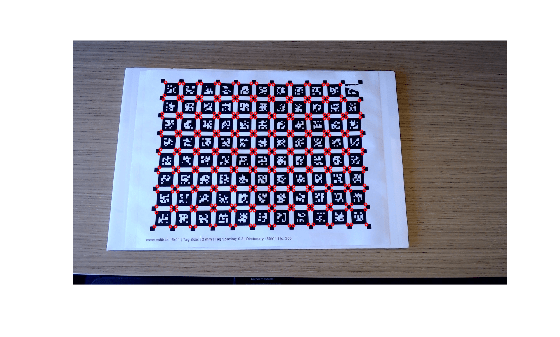
Visualize the detected points in the image.
figure; imshow(I) hold on plot(imagePoints(:,1),imagePoints(:,2),"ro",MarkerSize=2)
Define the parameters to estimate the board corners in the camera frame.
tagSize = 21.5; tagSpacing = 6.5; padding = [56 18 53 27];
Estimate board corners in the camera frame.
cornersCamera = estimateBoardCornersCamera("aprilgrid",imagePoints,intrinsics, ... patternDims,tagSize,tagSpacing,Padding=padding);
Undistort image for visualization.
J = undistortImage(I,intrinsics);
Project the corner points to the image.
cornersImage = projectLidarPointsOnImage(cornersCamera,intrinsics,rigidtform3d);
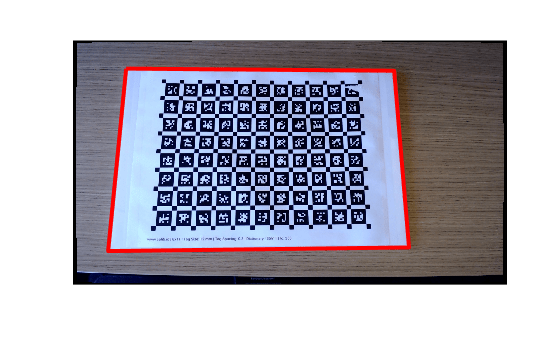
Visualize the estimated board corners in the undistorted image.
figure imshow(J) hold on showShape("polygon",cornersImage,Color="red",LineWidth=3)
Input Arguments
Output Arguments
Tips
Labeled diagrams of Checkerboard, ChArUco, and AprilGrid calibration patterns.
Checkerboard ChArUco AprilGrid