lidarObjectDetectorTrainingData
Syntax
Description
trainingData = lidarObjectDetectorTrainingData(gTruth)
[
creates a file datastore and a box label datastore training data from the specified ground
truth label data. To create a datastore for training the network, combine the file and box
label datastores by using ptds,blds] = lidarObjectDetectorTrainingData(gTruth)combine(ptds, blds). Use the combined
datastore to train the deep learning networks in Lidar Toolbox for lidar object detection.
___ = lidarObjectDetectorTrainingData(
uses additional options specified by one or more name-value arguments.gTruth,Name=Value)
Examples
Input Arguments
Name-Value Arguments
Output Arguments
Labeled data for training the network, returned as a table with two or more columns. The first column of the table contains point cloud file names with paths. Each of the remaining columns correspond to a cuboid ROI label and contains the locations of bounding boxes in the point cloud sample (specified in the first column), for that label. The bounding boxes are specified as a
M-by-9 numeric matrix with rows of the form
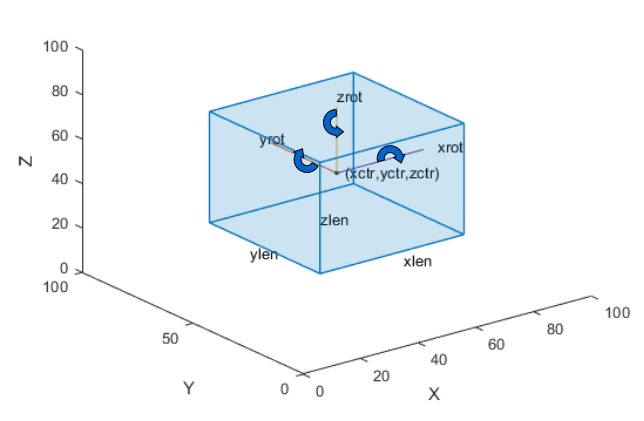
[xctr, yctr, zctr, xlen, ylen, zlen, xrot, yrot, zrot], where:
Mis the number of labels in the frame.xctr,yctr, andzctrspecify the center of the cuboid.xlen,ylen, andzlenspecify the length of the cuboid along the x-axis, y-axis, and z-axis, respectively, before rotation has been applied.xrot,yrot, andzrotspecify the rotation angles for the cuboid along the x-axis, y-axis, and z-axis, respectively. These angles are clockwise-positive when looking in the forward direction of their corresponding axes.
The figure shows how these values determine the position of a cuboid.
Data Types: table
Extracted point cloud data, returned as a fileDatastore object. The point cloud data must contain at least one class
label. The function ignores unlabeled point cloud data.
Extracted ROI labels, returned as a boxLabelDatastore object. The datastore contains M-by-9 matrices of M bounding boxes and
categorical vectors of cuboid ROI label names.
The bounding boxes are specified as a
M-by-9 numeric matrix with rows of the form
[xctr, yctr, zctr, xlen, ylen, zlen, xrot, yrot, zrot], where:
Mis the number of labels in the frame.xctr,yctr, andzctrspecify the center of the cuboid.xlen,ylen, andzlenspecify the length of the cuboid along the x-axis, y-axis, and z-axis, respectively, before rotation has been applied.xrot,yrot, andzrotspecify the rotation angles for the cuboid along the x-axis, y-axis, and z-axis, respectively. These angles are clockwise-positive when looking in the forward direction of their corresponding axes.
The figure shows how these values determine the position of a cuboid.
Extended Capabilities
Version History
Introduced in R2022a