findPose
Syntax
Description
absPose = findPose(scanMapObj,scan)
absPose = findPose(scanMapObj,scan,positionEstimate)
[___] = findPose(___,Name=Value) specifies
options using one or more name-value arguments in addition to any combination of arguments
from previous syntaxes. For example,
findPose(scanMapObj,scan,positionEstimate,SearchRadius=10) searches for
a matching scan in the map within a 10 meter radius of the position estimate.
Examples
Load a MAT file containing 2-D lidar scans and a warehouse map into the workspace.
data = load("wareHouse.mat");
scanMapObj = data.wareHouseMap;
lidarScans = data.wareHouseScans;Display the warehouse map.
ax = show(scanMapObj,ShowTrajectory=false);
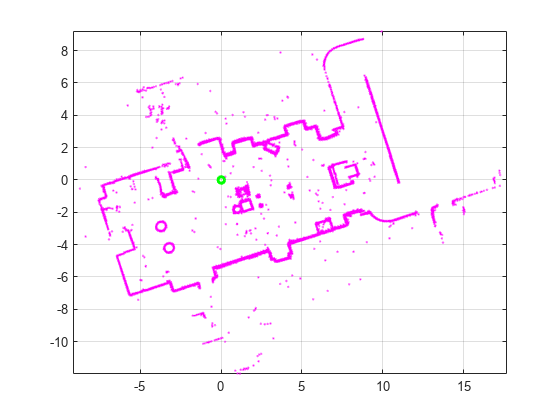
Find the absolute pose of the first scan in the map by using the findPose function. Specify the pose estimate of the scan as [0 0] and the search radius as 5 meters.
absPose = findPose(scanMapObj,lidarScans{1},[0 0],SearchRadius=5);Display the pose of the first scan in the map.
showShape("circle",[absPose(1:2) 0.2],Color="g",Parent=ax)
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2022b
See Also
lidarscanmap | poseGraph | addScan | updateScanPoses | detectLoopClosure | deleteLoopClosure | show