poseGraph
Description
pGraph = poseGraph(scanMapObj)scanMapObj. You
can use this pose graph for inspection, visualization, and pose graph optimization.
This function requires Navigation Toolbox™ version 2.3 or higher.
To optimize the pose graph output, use the optimizePoseGraph (Navigation Toolbox)
function.
Examples
Load a MAT file containing 2-D lidar scans into the workspace.
data = load("wareHouse.mat");
scans = data.wareHouseScans;Create a lidarscanmap object.
scanMapObj = lidarscanmap;
Add the first 15 scans from the input data to the scanMapObj object by using the addScan function.
for currentID = 1:15 addScan(scanMapObj,scans{currentID}); end
Create a pose graph for the scanMapObj.
poseGraph(scanMapObj);
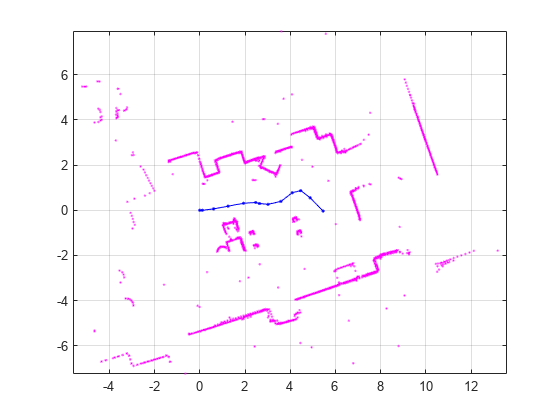
Visualize the map.
figure show(scanMapObj);
Input Arguments
Output Arguments
Version History
Introduced in R2022b
See Also
lidarscanmap | findPose | addScan | updateScanPoses | detectLoopClosure | show