show
Description
show( displays the map defined by
the scanMapObj)lidarscanmap
object scanMapObj, with all lidar scans overlaid at their estimate poses
in the map. The function also displays the sensor trajectory.
ax = show(scanMapObj)ax.
[___] = show(___,Name=Value) specifies
options using one or more name-value arguments in addition to any combination of arguments
from previous syntaxes. For example,
show(scanMapObj,ShowTrajectory=False) displays the pose graph of lidar
scans, but not the sensor trajectory.
Examples
Load a MAT file containing 2-D lidar scans into the workspace.
data = load("wareHouse.mat");
scans = data.wareHouseScans;Create a lidarscanmap object.
scanMapObj = lidarscanmap;
Add the first 15 scans from the input data to the scanMapObj object by using the addScan function.
for currentID = 1:15 addScan(scanMapObj,scans{currentID}); end
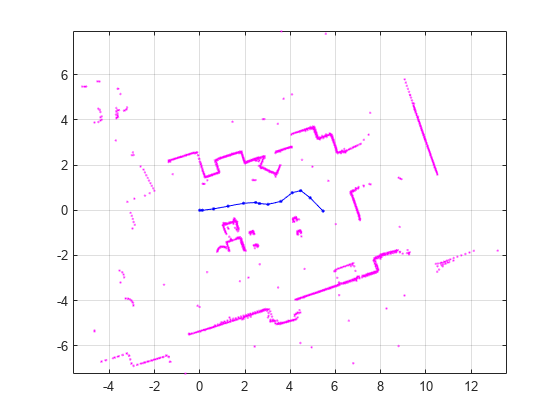
Visualize the map and the sensor trajectory.
figure show(scanMapObj);
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2022b
See Also
lidarscanmap | poseGraph | addScan | findPose | updateScanPoses | copy