segmentAerialLidarPowerline
Syntax
Description
powerlinePtsIdx = segmentAerialLidarPowerline(ptCloud)ptCloud using pretrained RandLA-Net model and returns the powerline
point indices.
Note
The input point cloud dimensions must be in meters.
This function requires Deep Learning Toolbox™.
[
additionally returns the powerline points and non-powerline points as individual
powerlinePtsIdx,nonPowerlinePtCloud,powerlinePtCloud] = segmentAerialLidarPowerline(ptCloud)pointCloud objects.
[___] = segmentAerialLidarPowerline(___,ExecutionEnvironment=
specifies the execution environment for the function in addition to any combination of
arguments from previous syntaxes.env)
Examples
Download a ZIP file containing aerial lidar data.
zipFile = matlab.internal.examples.downloadSupportFile("lidar","data/PowerlineAerialData.zip"); saveFolder = fileparts(zipFile); fileName = fullfile(saveFolder,"PowerlineAerialData","powerlineAerialLidarData.las"); unzip(zipFile,saveFolder);
Read point cloud data from the LAS file into the workspace.
lasReader = lasFileReader(fileName); ptCloud = readPointCloud(lasReader);
Segment the powerline points from the point cloud.
[~,nonPowerlinePtCloud,powerlinePtCloud] = segmentAerialLidarPowerline(ptCloud);
Visualize the powerline and non-powerline points.
figure
pcshowpair(powerlinePtCloud,nonPowerlinePtCloud,ViewPlane="XZ")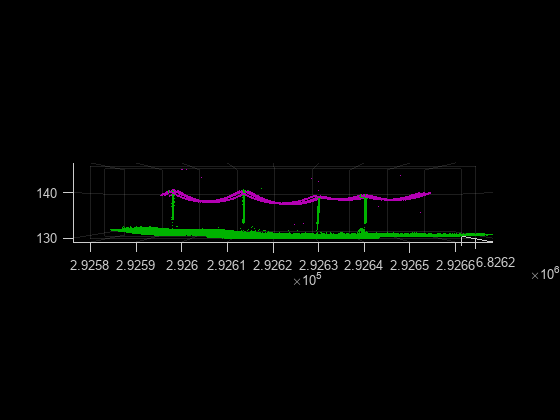
Input Arguments
Output Arguments
Algorithms
This function uses a RandLA-Net network to segment powerline points from aerial lidar data. RandLA-Net is a simple and efficient neural network for performing semantic segmentation on large point clouds.
Each layer of the network randomly downsamples the large point cloud which significantly decreases the point density. To retain the key features of the downsampled point cloud for semantic segmentation, the network uses a local feature aggregation module on each point.
The local feature aggregation module has these units.
Local Spatial Encoding — Embeds the coordinates of all neighboring points to observe local geometric patterns. This eventually enables the network to effectively learn complex local structures.
Attentive Pooling — Aggregates the set of neighboring point features.
Dilated Residual Block — Stacks multiple Local Spatial Encoding units and Attentive Pooling units with a skip connection to preserve the geometric details of the points.
Using these modules, RandLA-Net stacks multiple local feature aggregation modules and random sampling layers to infer semantic labels for large point clouds.
Version History
Introduced in R2023b