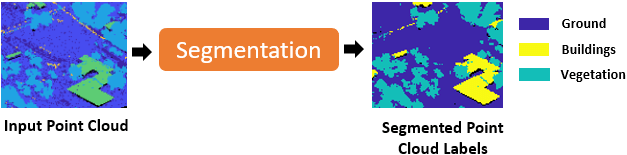
Segmentation
Semantic segmentation clusters the points of a 3-D point
cloud by using their similar characteristics, and associates each point with a class
label such as car, building,
ground, or vegetation.
You can segment a point cloud based on edges, neighboring point properties, and geometric shapes such as a cuboid, plane, or cylinder. For more information on the segmentation process, see the Terrain Classification for Aerial Lidar Data example.
Lidar Toolbox™ functions also support semantic segmentation using deep learning. You can use the included pretrained RandLA-Net, Segment Anything Model (SAM), PointSeg, SqueezeSegV2, and PointNet++ convolutional neural networks (CNNs) or develop custom segmentation models. For an example of the segmentation process using a RandLA-Net network, see Aerial Lidar Semantic Segmentation Using RandLANet Deep Learning.
Functions
Topics
- Deep Learning with Point Clouds
Learn point cloud processing using deep learning.
- Semantic Segmentation in Point Clouds Using Deep Learning
Assign class labels to each point inside a point cloud using deep learning.
- Get Started with PointNet++
Define a PointNet++ network and use it to perform semantic segmentation.
- Get Started with RandLA-Net
Define a RandLA-Net network and use it to perform semantic segmentation of large-scale point clouds.
- Datastores for Deep Learning (Deep Learning Toolbox)
Learn how to use datastores in deep learning applications.
- List of Deep Learning Layers (Deep Learning Toolbox)
Discover all the deep learning layers in MATLAB®.
- Generate RoadRunner Scene Using Aerial Hyperspectral and Lidar Data (Automated Driving Toolbox)
Generate RoadRunner scene from aerial hyperspectral and lidar data.
Featured Examples
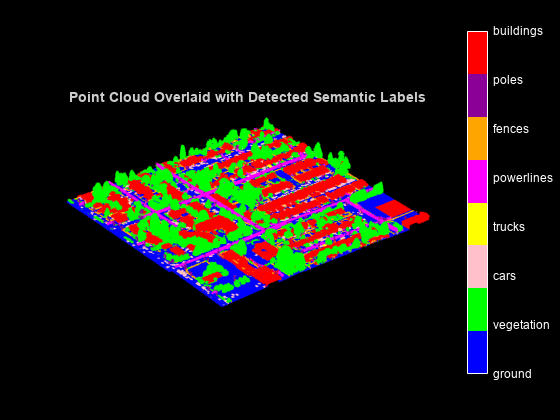
Aerial Lidar Semantic Segmentation Using RandLANet Deep Learning
Train a RandLANet deep learning network to perform semantic segmentation on aerial lidar data.
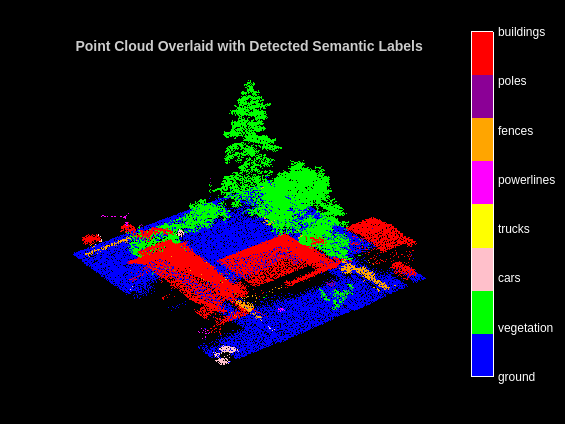
Aerial Lidar Semantic Segmentation Using PointNet++ Deep Learning
Train a PointNet++ deep learning network to perform semantic segmentation on aerial lidar data.
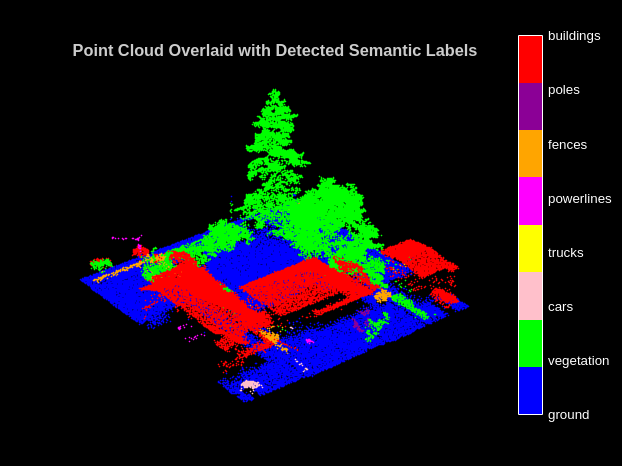
Code Generation for Aerial Lidar Semantic Segmentation Using PointNet++ Deep Learning
Generate CUDA® MEX code for a PointNet++ network for lidar semantic segmentation.

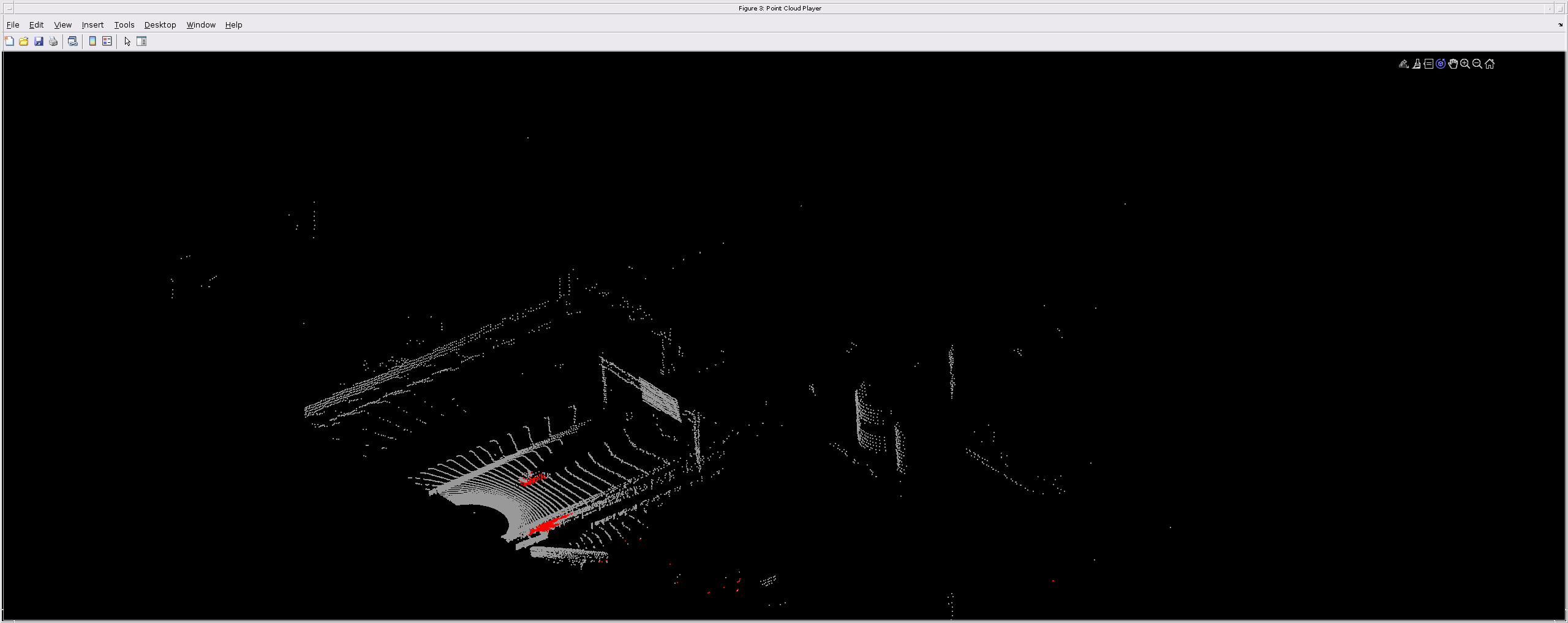
Lidar Point Cloud Semantic Segmentation Using PointSeg Deep Learning Network
Train a PointSeg semantic segmentation network on 3-D organized lidar point cloud data.
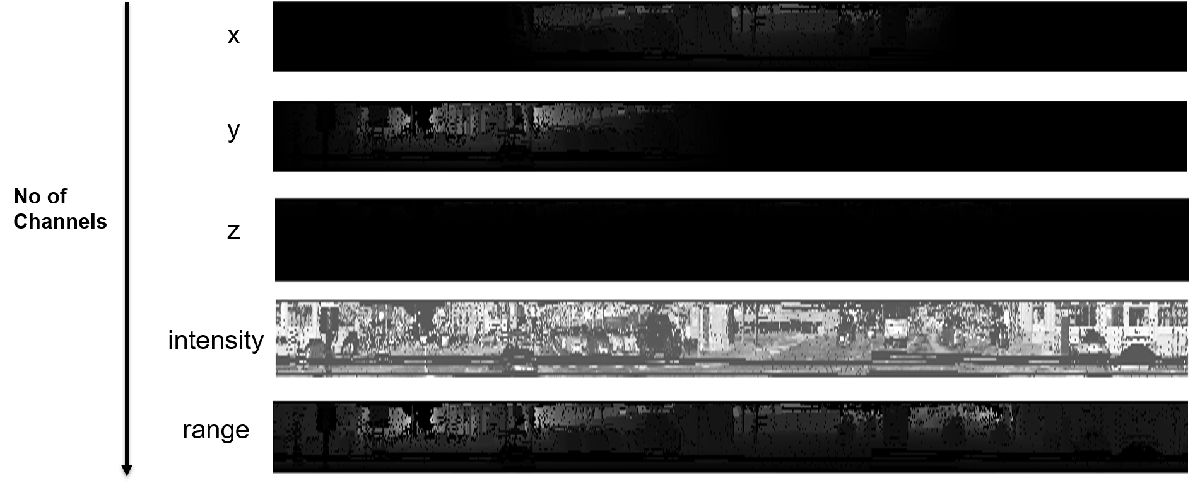
Lidar Point Cloud Semantic Segmentation Using SqueezeSegV2 Deep Learning Network
Train a SqueezeSegV2 semantic segmentation network on 3-D organized lidar point cloud data.
Code Generation for Lidar Point Cloud Segmentation Network
Generate CUDA® MEX code for a deep learning network for lidar semantic segmentation. This example uses a pretrained SqueezeSegV2 [1] network that can segment organized lidar point clouds belonging to three classes (background, car, and truck). For information on the training procedure for the network, see Lidar Point Cloud Segmentation Using SqueezeSegV2 Deep Learning Network. The generated MEX code takes a point cloud as input and performs prediction on the point cloud by using the DAGNetwork object for the SqueezeSegV2 network.
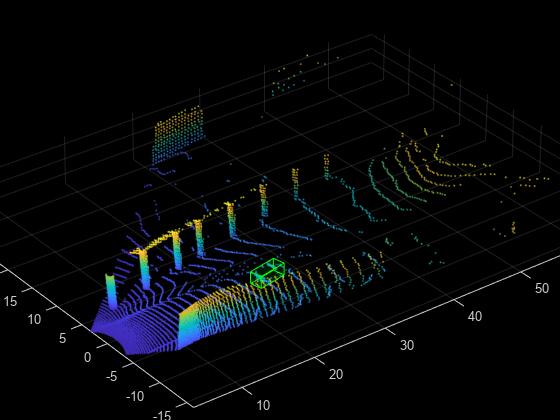
Data Augmentations for Lidar Object Detection Using Deep Learning
Perform typical data augmentation techniques for 3-D object detection workflows with lidar data.
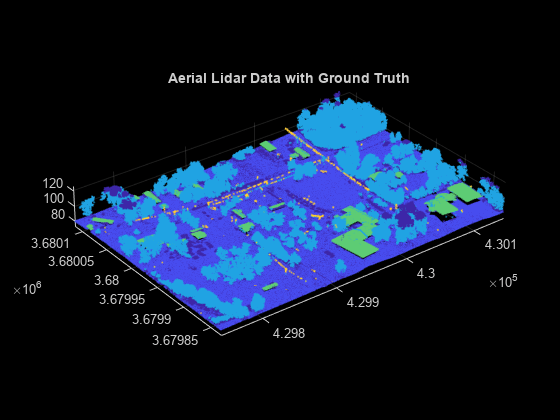
Terrain Classification for Aerial Lidar Data
Segment and classify terrain in aerial lidar data as ground, building, and vegetation. The example uses a LAZ file captured by an airborne lidar system as input. First, classify the point cloud data in the LAZ file into ground and non-ground points. Then, further classify non-ground points into building and vegetation points based on normals and curvature features. This figure provides an overview of the process.
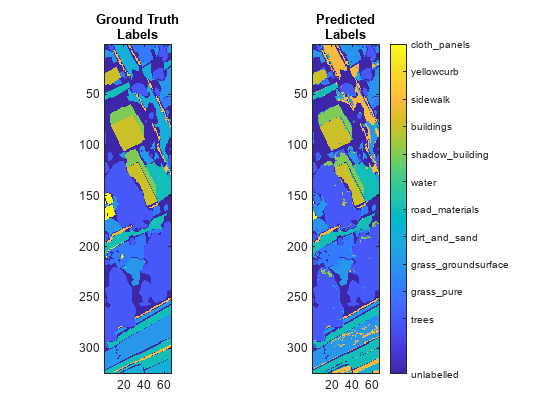
Classify Land Cover Using Hyperspectral and Lidar Data
Classify land cover using a fusion of hyperspectral and lidar data.
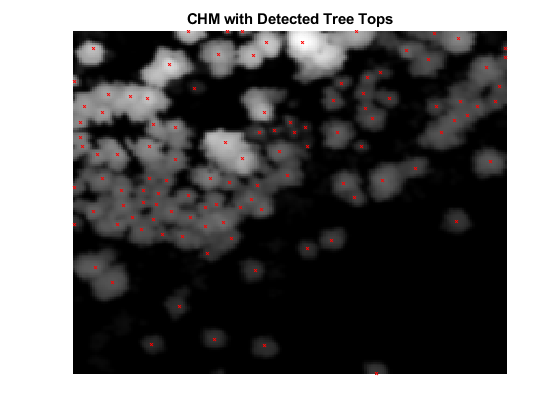
Extract Individual Tree Attributes and Forest Metrics from Aerial Lidar Data
Extract individual tree attributes and forest metrics from aerial lidar data.