segmentCurbPoints
Syntax
Description
curbPtsIdx = segmentCurbPoints(onRoadPointCloud)
curbPtsIdx = segmentCurbPoints(onRoadPointCloud,roadAngles)
curbPtsIdx = segmentCurbPoints(onRoadPointCloud,roadAngles,prevCurbPoints)
[
returns the segmented curb points in the on-road point cloud as a curbPtsIdx,curbPtCloud] = segmentCurbPoints(___)pointCloud object, using any combination of input arguments from previous
syntaxes.
[___] = segmentCurbPoints(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)HeightLimits=[0.1 0.3]
specifies the minimum and the maximum height of the road curb as 0.1 and 0.3 meters,
respectively.
Examples
Read point cloud data from a PCD file by using the pcread function.
ptCloud = pcread("HDL64LidarData.pcd");Organize the point cloud data by using the pcorganize function.
ptCloud = pcorganize(ptCloud,lidarParameters("HDL64E",1024));Extract a region of interest, which contains a road, from the point cloud data.
roi = [-25 25 -10 24 ptCloud.ZLimits];
indices = findPointsInROI(ptCloud,roi);
ptCloud = select(ptCloud,indices,OutputSize="full");Segment the on-road and off-road points from the point cloud by using the segmentGroundSMRF function.
[~,offRoadPtCloud,onRoadPtCloud] = segmentGroundSMRF(ptCloud);
Detect road angles from the off-road points.
roadAngles = detectRoadAngles(offRoadPtCloud,MinSectorSize=10,SectorMergeThreshold=30);
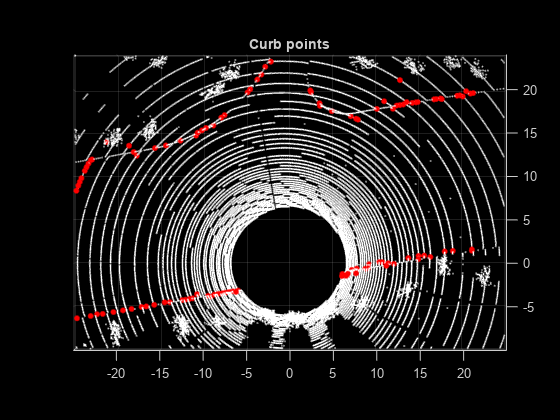
Segment curb points from the on-road points of the point cloud.
[~,curbPtCloud] = segmentCurbPoints(onRoadPtCloud,roadAngles,NumScanNeighbors=10, ... HeightLimits=[0.001 0.5],HeightDeviationLimits=[0.001 0.5], ... SmoothnessThreshold=0.0001,HorizontalAngularResolution=0.33);
Visualize the segmented curb points.
figure pcshow(ptCloud.Location,"w") hold on; pcshow(curbPtCloud.Location,"r",MarkerSize=200) hold off view(2) title("Curb points")
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
The function extracts curb points from onRoadPointCloud using these steps.
For each point in a scan line, the function computes these three features.
Height Difference Feature — Computes the standard deviation and the height maximum difference around a point. The standard deviation and height difference of a curb point must be within the specified
HeightDeviationLimitsandHeightLimits, respectively.Smoothness Feature — Computes the smoothness of the area around a point. A higher smoothness value indicates that the point is an edge point, and a lower values indicates that the point is a plane point. The smoothness value for a curb point must be greater than the
SmoothnessThresholdvalue.Horizontal and Vertical Continuity Feature — Computes the horizontal and vertical distance between a point and its immediate neighbors. These horizontal and vertical distance values must be less than the horizontal and the vertical continuity thresholds, respectively. The function computes the thresholds values from the
HorizontalAngularResolutionof the lidar sensor.
If a point satisfies all computed features, then it as a feature curb point.
If you specify road angles as an input, the function further fine tunes the feature curb points using RANSAC polynomial fitting, and returns the candidate curb points.
Version History
Introduced in R2022b