detectRoadAngles
Syntax
Description
roadAngles = detectRoadAngles(offRoadPointCloud)
roadAngles = detectRoadAngles(offRoadPointCloud,Name=Value)MinSectorSize=10 specifies the minimum sector size required to detect a
road segment as 10 degrees.
Examples
Read point cloud data from a PCD file by using the pcread function.
ptCloud = pcread("HDL64LidarData.pcd");Organize the point cloud data by using the pcorganize function.
ptCloud = pcorganize(ptCloud,lidarParameters("HDL64E",1024));Extract a region of interest, which contains a road, from the point cloud data.
roi = [-25 25 -10 24 ptCloud.ZLimits];
indices = findPointsInROI(ptCloud,roi);
ptCloud = select(ptCloud,indices,OutputSize="full");Segment the on-road and off-road points from the point cloud by using the segmentGroundSMRF function.
[~,offRoadPtCloud,onRoadPtCloud] = segmentGroundSMRF(ptCloud);
Detect road angles from the off-road points.
roadAngles = detectRoadAngles(offRoadPtCloud,MinSectorSize=10,SectorMergeThreshold=30);
Segment curb points from the on-road points of the point cloud.
[~,curbPtCloud] = segmentCurbPoints(onRoadPtCloud,roadAngles,NumScanNeighbors=10, ... HeightLimits=[0.001 0.5],HeightDeviationLimits=[0.001 0.5], ... SmoothnessThreshold=0.0001,HorizontalAngularResolution=0.33);
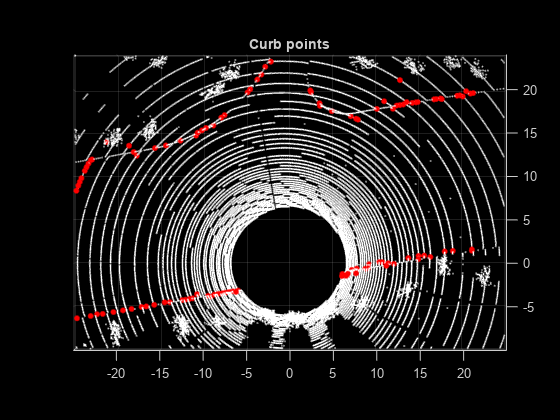
Visualize the segmented curb points.
figure pcshow(ptCloud.Location,"w") hold on; pcshow(curbPtCloud.Location,"r",MarkerSize=200) hold off view(2) title("Curb points")
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
The function uses a beam model, followed by a toe-finding algorithm, on the off-road points to detect the road angles.
![]()
The toe-finding algorithm follows these steps.
Classify the beam zones into sectors based on their normalized beam lengths.
Update the sectors using the specified
MinSectorSizeandSectorMergeThresholdvalues.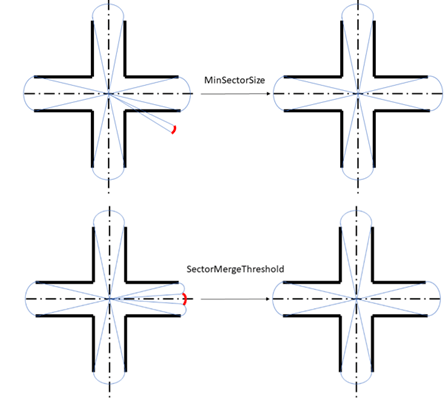
Return the center angle of each sector with respect to the positive x-axis as the road segmentation angle.
Version History
Introduced in R2022b