dde23
求解带有固定时滞的时滞微分方程 (DDE)
说明
示例
求解时滞微分方程组
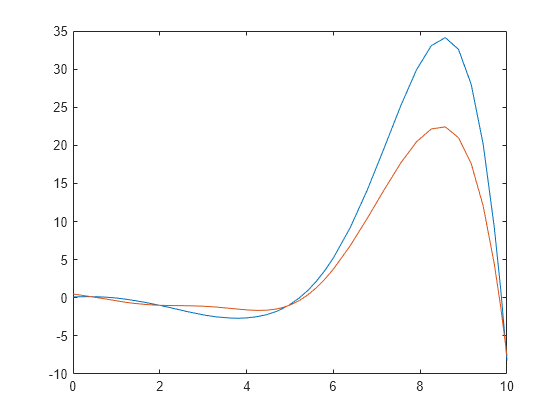
,
其中 具有常历史解 , 具有常历史解 ()。应用于 的时滞是 2,应用于 的时滞是 1。
将 DDE 方程组定义为一个名为 ddefun 的局部函数。
function dydt = ddefun(t,y,Z) ydelay1 = Z(:,1); ydelay2 = Z(:,2); dydt = [-2*ydelay1(1) + y(2); y(1) - 2*ydelay2(2)]; end
指定积分区间为 [0 10],时滞为向量 [2; 1],历史解为向量 [0.1; 0.5]。使用 dde23 解算 DDE。
tspan = [0 10]; delays = [2; 1]; history = [0.1; 0.5]; sol = dde23(@ddefun,delays,history,tspan);
绘制结果。
plot(sol.x,sol.y)
求解 DDE
,
其中,当 时,。
将 DDE 定义为名为 ddefun 的局部函数。
function dydt = ddefun(t,y,ydelay) dydt = -2*ydelay*(1+y); end
将历史解定义为名为 history 的局部函数。
function h = history(t) h = t; end
通过使用 ddeset 函数指定积分器 options 结构体的 Events 字段,在不终止积分的情况下找到方程的零点。
function [position,isterminal,direction] = zeroEventsFcn(t,y,ydelay) position = y(1); isterminal = 0; direction = 0; end opts = ddeset(Events=@zeroEventsFcn);
指定积分区间为 [0 10],时滞为 1。然后使用 dde23 求解 DDE。
tspan = [0 10]; delays = 1; sol = dde23(@ddefun,delays,@history,tspan,opts);
绘制结果和过零点的位置。
plot(sol.x,sol.y,sol.xe,sol.ye,"o")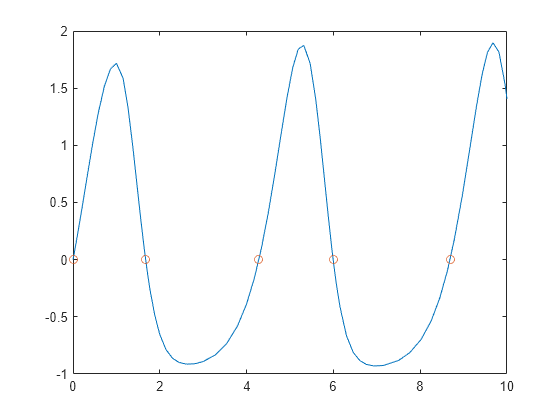
输入参数
输出参量
算法
dde23 跟踪不连续性并使用显式龙格-库塔 (2,3) 对和插值对 ode23 求积分。它通过迭代来采用超过时滞的步长。
参考
[1] Shampine, Lawrence F., and S. Thompson. "Solving DDEs in MATLAB." Applied Numerical Mathematics 37, no. 4 (June 2001): 441–458. https://doi.org/10.1016/S0168-9274(00)00055-6.
[2] Kierzenka, Jacek. "Tutorial on Solving DDEs with DDE23." MATLAB Central File Exchange. Updated September 1, 2016. https://www.mathworks.com/matlabcentral/fileexchange/3899-tutorial-on-solving-ddes-with-dde23.
[3] Willé, David R., and Christopher T. H. Baker. "DELSOL—a Numerical Code for the Solution of Systems of Delay-Differential Equations." Applied Numerical Mathematics 9, no. 3 (April 1992): 223–234. https://doi.org/10.1016/0168-9274(92)90017-8.
版本历史记录
在 R2006a 之前推出