solve
说明
示例
创建一个 ode 对象以对函数 dydt = @(t,y) (1/2)*t^2 进行积分。将 dydt 的初始值指定为 0。
F = ode(ODEFcn=@(t,y) (1/2)*t^2,InitialValue=0);
使用 solve 方法对 ode 对象进行积分。使用 linspace 指定时间向量,以计算在区间 [0 5] 内特定时间点处的解。
t = linspace(0,5); S = solve(F,t)
S =
ODEResults with properties:
Time: [0 0.0505 0.1010 0.1515 0.2020 0.2525 0.3030 0.3535 0.4040 0.4545 0.5051 0.5556 0.6061 0.6566 0.7071 0.7576 0.8081 0.8586 0.9091 0.9596 1.0101 1.0606 1.1111 1.1616 1.2121 1.2626 1.3131 1.3636 1.4141 1.4646 1.5152 1.5657 … ] (1×100 double)
Solution: [0 2.1471e-05 1.7177e-04 5.7972e-04 0.0014 0.0027 0.0046 0.0074 0.0110 0.0157 0.0215 0.0286 0.0371 0.0472 0.0589 0.0725 0.0879 0.1055 0.1252 0.1473 0.1718 0.1988 0.2286 0.2612 0.2968 0.3355 0.3774 0.4226 0.4713 0.5237 … ] (1×100 double)
绘制结果。
plot(S.Time,S.Solution,"-o")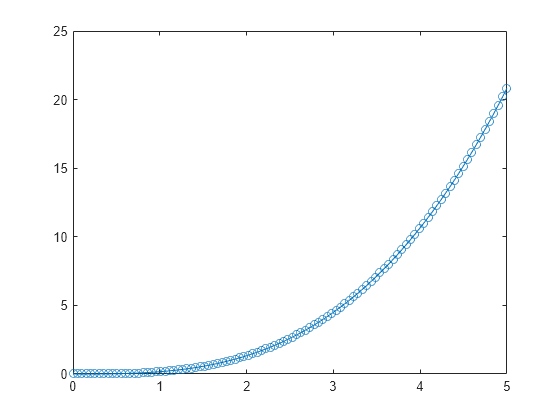
再次对 ode 对象进行积分,这次指定在区间 [-5 5] 内的时间点。尽管 dydt 的初始值默认在 F.InitialTime=0 处应用,但 solve 方法可以计算在初始时间前的解。
t2 = linspace(-5,5);
S2 = solve(F,t2);
plot(S2.Time,S2.Solution,"-o")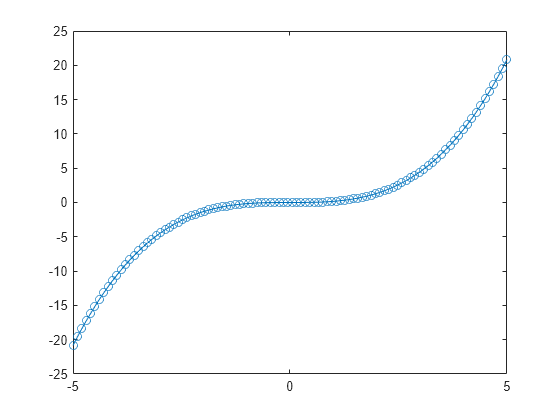
创建一个 ode 对象以对此方程组进行积分。
指定 和 的初始值。
F = ode(ODEFcn=@(t,y) [y(2); -y(1)],InitialValue=[0 1]);
使用 solve 方法在区间 [0 2*pi] 内对 ode 对象进行积分。绘制结果。
S = solve(F,0,2*pi);
plot(S.Time,S.Solution,"-o")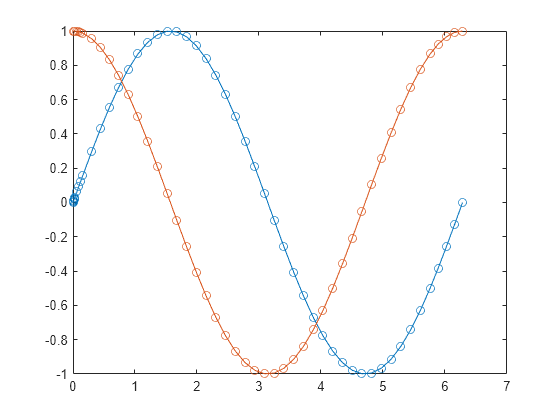
再次对 ode 对象进行积分,这次指定 Refine=6 以在每个时间步生成额外的解点。
S2 = solve(F,0,2*pi,Refine=6);
plot(S2.Time,S2.Solution,"-o")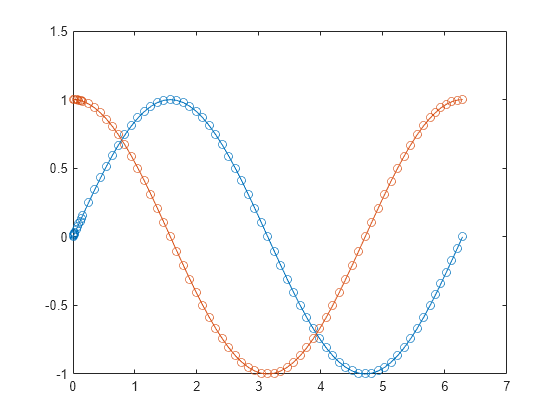
输入参数
输出参量
版本历史记录
在 R2023b 中推出
另请参阅
ode | solutionFcn | ODEResults | odextend