pdepe
求解一维抛物型和椭圆型 PDE
语法
说明
[ 还求 (t,u(x,t)) 的函数(称为事件函数)在何处为零。在输出中,sol,tsol,sole,te,ie] = pdepe(m,pdefun,icfun,bcfun,xmesh,tspan,options)te 是事件的时间,sole 是事件发生时的解,ie 是触发的事件的索引。tsol 是 tspan 中指定的、第一次终止事件之前的时间的列向量。
对于每个事件函数,应指定积分是否在零点处终止以及过零方向是否重要。为此,请将 odeset 的 Events 选项设置为函数(例如 @myEventFcn),并创建一个对应的函数:[value,isterminal,direction] = myEventFcn(m,t,xmesh,umesh)。xmesh 输入包含空间网格,umesh 是网格点上的解。
示例
使用 pdepe 求解柱坐标下的热方程,并对解绘图。
在角对称的柱坐标中,热方程是
该方程定义中,时间 且 。初始条件根据 bessel 函数 及其第一个零点 定义为
由于此问题采用柱坐标 (m = 1),pdepe 会自动在 处强制应用对称条件。右边界条件为
初始条件和边界条件已选定为与问题的解析解一致,
要在 MATLAB® 中求解该方程,您需要对方程、初始条件和边界条件编写代码,然后在调用求解器 pdepe 之前选择合适的解网格。您可以将所需的函数作为局部函数包含在文件末尾(如本处所示),或者将它们作为单独的命名文件保存在 MATLAB 路径上的目录中。
编写方程代码
在编写方程代码之前,您需要按照 pdepe 求解器所需的形式对其进行重写。pdepe 所需的标准形式是
以这种形式编写的 PDE 变为
将方程写作适当形式后,可知相关各项为:
现在,您可以创建一个函数以编写方程代码。该函数应具有签名 [c,f,s] = heatcyl(x,t,u,dudx):
x是独立的空间变量。t是独立的时间变量。u是关于x和t微分的因变量。dudx是偏空间导数 。输出
c、f和s对应于pdepe所需的标准 PDE 形式中的系数。根据输入变量x、t、u和dudx对这些系数编写代码。
因此,此示例中的方程可以由以下函数表示:
function [c,f,s] = heatcyl(x,t,u,dudx) c = 1; f = dudx; s = 0; end
(注意:所有函数都作为局部函数包含在示例的末尾。)
编写初始条件代码
接下来,编写一个返回初始条件的函数。初始条件应用于第一个时间值 tspan(1)。该函数应具有签名 u0 = heatic(x)。
的对应函数是
function u0 = heatic(x) n = 2.404825557695773; u0 = besselj(0,n*x); end
编写边界条件代码
现在,编写计算以下边界条件的函数
由于此问题采用柱坐标 (m = 1),pdepe 会自动在 处强制应用对称条件,因此您不需要指定左边界条件。
对于在区间 上提出的问题,边界条件应用于所有 以及 或 。求解器所需的边界条件的标准形式是
以这种形式编写, 的偏导数的边界条件需要用通量 来表示。因此,此问题的右边界条件是
边界函数应具有函数签名 [pl,ql,pr,qr] = heatbc(xl,ul,xr,ur,t):
对于左边界,输入
xl和ul对应于 和 。对于右边界,输入
xr和ur对应于 和 。t是独立的时间变量。对于左边界,输出
pl和ql对应于 和 (对于此问题,)。对于右边界,输出
pr和qr对应于 和 (对于此问题,)。
此示例中的边界条件由以下函数表示:
function [pl,ql,pr,qr] = heatbc(xl,ul,xr,ur,t) n = 2.404825557695773; pl = 0; %ignored by solver since m=1 ql = 0; %ignored by solver since m=1 pr = ur-besselj(0,n)*exp(-n^2*t); qr = 0; end
选择解网格
在求解方程之前,需要指定希望用 pdepe 计算解的网格点 。将点指定为向量 t 和 x。向量 t 和 x 在求解器中的作用不同。尤其是解的成本和精确度很大程度上依赖于向量 x 的长度。然而,计算对向量 t 中的值并不敏感。
对于此问题,请使用空间区间 [0,1] 内具有 25 个等间距点的网格来指定 x 和 t。
x = linspace(0,1,25); t = linspace(0,1,25);
求解方程
最后,使用对称性值 m、PDE 方程、初始条件、边界条件以及 x 和 t 的网格来求解方程。
m = 1; sol = pdepe(m,@heatcyl,@heatic,@heatbc,x,t);
pdepe 以三维数组 sol 形式返回解,其中 sol(i,j,k) 是在 t(i) 和 x(j) 处计算的解 的第 k 个分量的逼近值。sol 的大小是 length(t)×length(x)×length(u0),因为 u0 为每个解分量指定初始条件。对于此问题,u 只有一个分量,因此 sol 是 25×25 矩阵,但通常您可以使用命令 u = sol(:,:,k) 提取第 k 个解分量。
从 sol 中提取第一个解分量。
u = sol(:,:,1);
对解进行绘图
创建解的曲面图。由于问题表现为柱坐标中的一个圆盘,x 值反映圆盘上距中心一定距离处的温度,t 值反映特定位置的温度随时间变化的情况。
surf(x,t,u) xlabel("x") ylabel("t") zlabel("u(x,t)") view([150 25])

绘制圆盘中心 () 的温度变化。
plot(t,sol(:,1)) xlabel("Time") ylabel("Temperature u(0,t)") title("Temperature change at center of disc")

局部函数
此处列出 PDE 求解器 pdepe 为计算解而调用的局部辅助函数。您也可以将这些函数作为它们自己的文件保存在 MATLAB 路径上的目录中。
function [c,f,s] = heatcyl(x,t,u,dudx) c = 1; f = dudx; s = 0; end %---------------------------------------------- function u0 = heatic(x) n = 2.404825557695773; u0 = besselj(0,n*x); end %---------------------------------------------- function [pl,ql,pr,qr] = heatbc(xl,ul,xr,ur,t) n = 2.404825557695773; pl = 0; %ignored by solver since m=1 ql = 0; %ignored by solver since m=1 pr = ur-besselj(0,n)*exp(-n^2*t); qr = 0; end %----------------------------------------------
求解偏微分方程,并使用事件函数记录振荡解中的过零点。
假设使用以下方程
该方程定义中, 且 。初始条件为
边界条件为
此外,需要关注解的过零点。
要在 MATLAB 中求解该方程,您需要对方程、初始条件、边界条件和事件函数编写代码,然后选择合适的解网格,最后调用求解器 pdepe 。您可以将所需的函数作为局部函数包含在文件末尾(如本处所示),或者将它们作为单独的命名文件保存在 MATLAB 路径上的目录中。
编写方程代码
在编写方程代码之前,您需要按照 pdepe 求解器所需的形式对其进行重写。pdepe 所需的标准形式是
PDE 方程已采用如下形式:
由此可知相关各项为:
现在,您可以创建一个函数以编写方程代码。该函数应具有签名 [c,f,s] = oscpde(x,t,u,dudx):
x是独立的空间变量。t是独立的时间变量。u是关于x和t微分的因变量。dudx是偏空间导数 。输出
c、f和s对应于pdepe所需的标准 PDE 形式中的系数。根据输入变量x、t、u和dudx对这些系数编写代码。
因此,此示例中的方程可以由以下函数表示:
function [c,f,s] = oscpde(x,t,u,dudx) c = 1/x; f = u/t; s = 0; end
(注意:所有函数都作为局部函数包含在示例的末尾。)
编写初始条件代码
接下来,编写一个返回初始条件的函数。初始条件应用于第一个时间值 tspan(1)。该函数应具有签名 u0 = oscic(x)。
的对应函数是
function u0 = oscic(x) u0 = 1; end
编写边界条件代码
现在,编写计算以下边界条件的函数
对于在区间 上提出的问题,边界条件应用于所有 以及 或 。求解器所需的边界条件的标准形式是
采用此形式编写时,此问题的边界条件为
边界函数应具有函数签名 [pl,ql,pr,qr] = oscbc(xl,ul,xr,ur,t):
对于左边界,输入
xl和ul对应于 和 。对于右边界,输入
xr和ur对应于 和 。t是独立的时间变量。对于左边界,输出
pl和ql对应于 和 (对于此问题,)。对于右边界,输出
pr和qr对应于 和 (对于此问题,)。
此示例中的边界条件由以下函数表示:
function [pl,ql,pr,qr] = oscbc(xl,ul,xr,ur,t) pl = ul - 1; ql = 0; pr = ur - cos(pi*t); qr = 0; end
编写事件函数代码
使用事件函数记录积分中解的过零点。事件函数具有函数签名 [value,isterminal,direction] = pdevents(m,t,xmesh,umesh):
m是坐标对称性,指定为pdepe的第一个输入。t是当前时间(标量)。xmesh是空间网格。umesh包含网格点上的解。value是需要关注的方程,通常用解umesh来表示。当value等于 0 时,事件发生。isterminal指定事件是否导致积分停止。如果isterminal为 0,则会记录事件,但积分不会停止。如果isterminal为 1,则当事件发生时,积分停止。direction指定过零的方向。如果为 1,则只有具有正斜率的过零点才会触发事件。如果为 -1,过零点必须具有负斜率。如果为 0,则任何过零点都会触发事件。
每次积分时,求解器都会调用事件函数来检查过零点。要记录所有过零点,value 应关注解向量 umesh 中的符号变化。将 isterminal 和 direction 指定为大小相同的零向量,因为此示例中的事件不是终止事件,且过零可以以任何斜率出现。
此问题的事件函数是
function [value,isterminal,direction] = pdevents(m,t,xmesh,umesh) value = umesh; isterminal = zeros(size(umesh)); direction = zeros(size(umesh)); end
选择解网格
在求解方程之前,需要指定希望用 pdepe 计算解的网格点 。对于此问题,请使用区间 和 内具有 50 个点的精细网格。精细网格能够清晰的呈现振荡解。
x = linspace(0,1,50); t = linspace(0.1,pi,50);
求解方程
最后,使用对称性 m、PDE 方程、初始条件、边界条件、事件函数以及 x 和 t 的网格来求解方程。使用 odeset 创建引用事件函数的 options 结构体,并将该结构体作为 pdepe 的最后一个输入参量传入。指定五个输出参量以返回来自事件函数和求解器的信息:
sol是用pdepe计算的解。tsol是终止事件前的时间向量。当没有发生终止事件时,tsol等于t。sole是在每个事件时间点处的解。te是每个事件的时间。ie是每个事件的索引。由于在事件函数中values = umesh,ie也给出了每个时间步上触发事件的umesh的索引。
m = 0; options = odeset(Events=@pdevents); [sol,tsol,sole,te,ie] = pdepe(m,@oscpde,@oscic,@oscbc,x,t,options);
将解提取为矩阵 u。
u = sol(:,:,1);
对解进行绘图
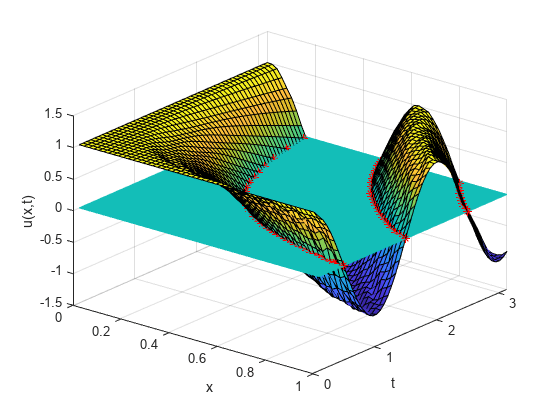
创建解的曲面图,并采用俯视绘图。
surf(x,t,u) view(2)

绘制发生事件的点,以曲面 作为参考。输出索引向量 ie 有助于找出事件位置。表达式 x(ie)' 给出事件发生处的 x 值,表达式 sole(x==x(ie)') 给出对应的解值。
view([39 30]) xlabel("x") ylabel("t") zlabel("u(x,t)") hold on plot3(x(ie)',te,sole(x==x(ie)'),'r*') surf(x,t,zeros(size(u)),EdgeColor="flat") hold off
局部函数
此处列出 PDE 求解器 pdepe 为计算解而调用的局部辅助函数。您也可以将这些函数作为它们自己的文件保存在 MATLAB 路径上的目录中。
function [c,f,s] = oscpde(x,t,u,dudx) c = 1/x; f = u/t; s = 0; end %---------------------------------------------- function u0 = oscic(x) u0 = 1; end %---------------------------------------------- function [pl,ql,pr,qr] = oscbc(xl,ul,xr,ur,t) pl = ul - 1; ql = 0; pr = ur - cos(pi*t); qr = 0; end %---------------------------------------------- function [value, isterminal, direction] = pdevents(m,t,xmesh,umesh) value = umesh; isterminal = zeros(size(umesh)); direction = zeros(size(umesh)); end %----------------------------------------------
输入参数
输出参量
提示
如果
uji = sol(j,:,i)在时间tspan(j)和网格点xmesh处近似于解的分量i,则pdeval计算在点数组xout处的逼近值及其偏导数 ∂ui/∂x,并将其在uout和duoutdx中返回:[uout,duoutdx] = pdeval(m,xmesh,uji,xout)。pdeval函数计算偏导数 ∂ui/∂x,而不是通量。通量是持续的,但在物质界面处偏导数可能有跳跃。
算法
时间积分使用 ode15s 求解器完成。pdepe 利用 ode15s 的功能解算当 PDE 包含椭圆型方程时产生的微分代数方程,并用来处理具有指定稀疏类型的雅可比矩阵。
经离散化处理后,椭圆型方程会生成代数方程。如果与椭圆型方程对应的初始条件向量的元素与离散化的结果不一致,pdepe 会在开始时间积分之前尝试调整这些元素。因此,为初始时间返回的解可能具有与其他时间类似的离散化误差。如果网格足够精细,pdepe 可找到接近于给定条件的一致初始条件。如果 pdepe 显示消息称找不到一致初始条件,请尝试细化网格。对于与抛物型方程对应的初始条件向量元素,则无需调整。
参考
[1] Skeel, R. D. and M. Berzins, "A Method for the Spatial Discretization of Parabolic Equations in One Space Variable," SIAM Journal on Scientific and Statistical Computing, Vol. 11, 1990, pp.1–32.