Field-Weakening Control
Field-weakening control, also known as flux-weakening control, extends the operating speed range of motor beyond its base speed by reducing the back EMF. The technique is commonly used for permanent magnet synchronous motors (PMSMs) and AC induction motors (ACIMs).
When you use Field-Oriented Control to run a motor with rated flux, the maximum speed, also known as base speed, is determined by the stator voltages, rated current, and back EMF. The back EMF is proportional to the magnetic field strength and rotor speed. Therefore, when you try to increase motor speed beyond base speed in an FOC system, the back EMF exceeds the supply voltage, preventing speedup. To run the motor above the base speed, you must increase the net applied voltage. You can do this by increasing the supply voltage, which might not be practical when you use constant supplies, or by reducing the back EMF using field-weakening control.
Field-weakening control enables you to run a motor at speeds beyond the base speed without increasing the stator voltages using FOC, at the expense of reduced torque. You can use field-weakening in automation applications and traction motor control for electric vehicles and locomotives to achieve higher motor speed when lower torque is acceptable.
Field-Weakening Control of PMSMs
Field-weakening control of PMSMs depends on motor saliency, which describes the difference in stator inductances along the d-axis and q-axis. In general, motors with higher saliency benefit more from field-weakening control as they can generate additional torque in the form of reluctance torque.
Motors such as surface-mount PMSMs (SPMSMs) have low saliency (identical d-axis and q-axis inductances), and generate a uniform stator flux along the d-q axes. The SPMSM experiences only the electromagnetic torque due to interactions between the uniform stator flux and the rotor flux. For more information, see Surface Mount PMSM.
Motors designed to render high saliency, such as interior PMSMs (IPMSMs), offer non-uniform inductances along d-q-axes. For such motors, the q-axis stator inductance is higher than the d-axis stator inductance. This difference causes the q-axis to have a lower reluctance (magnetic path resistance) and higher stator flux for a given stator current. Due to the difference in flux between the two axes, the motor develops a tendency to align itself along the path of least magnetic reluctance (the q-axis), producing an additional torque known as reluctance torque. An IPMSM therefore experiences both electromagnetic torque due to the interaction between stator and rotor magnetic fields, and reluctance torque due to the motor saliency. For more information, see Interior PMSM.
While field-weakening control can be used to run both SPMSMs and IPMSMs beyond their base speed, it is more commonly applied to IPMSMs, which benefit from their characteristic high saliency. As shown in the diagram below, the technique applies a negative d-axis stator current to reverse the direction of the d-axis stator flux. This operation reduces the rotor flux by weakening the magnetic field in the area between the rotor and stator. Weakening the rotor flux reduces the back EMF, enabling peak torque production at a given operating speed. Using this technique, the motor can reach speeds beyond the base speed without increasing the stator voltages or exceeding the rated current.
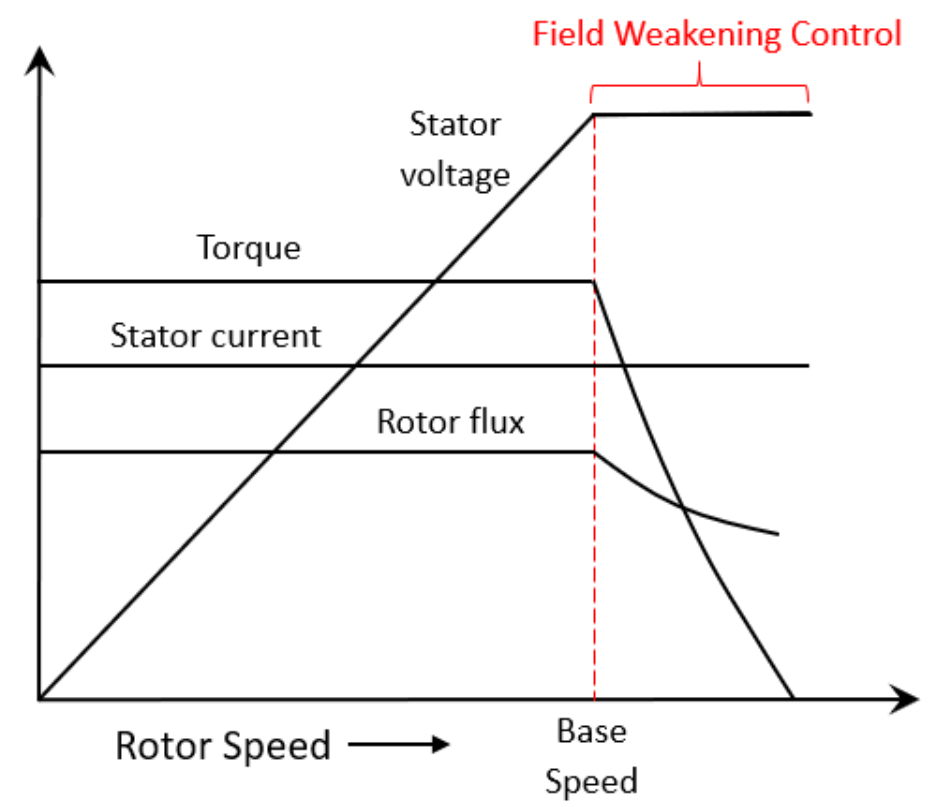
Depending on the connected load and rated current of the motor, the reference d-axis current (Id) in field-weakening control also limits the reference q-axis current (Iq) and thus reduces the torque output. Therefore, the motor operates in the constant torque region until the base speed. Above the base speed, the motor operates in the constant power region with a limited torque.
The computations for the reference current Id depend on the motor and inverter parameters.
Special Considerations
For some surface PMSMs, you might not be able to achieve higher speeds at the rated current. In those cases, achieving higher speeds requires overloading the motor with maximum currents that are higher than the rated current, if the thermal conditions of the machine are within the permissible limits.
When you operate the motor above the base speed, monitor the temperature of the motor. During motor operation, if the motor temperature rises beyond the temperature recommended by the manufacturer, turn off the motor for safety reasons.
When you operate the motor above the base speed, increment the speed reference in small steps, to avoid the dynamics of field weakening that can make some systems unstable.