非线性表征
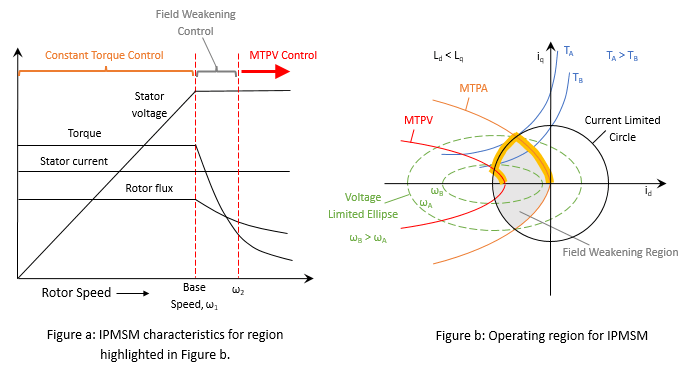
您可以使用 Motor Control Blockset™ 来识别和建模偏离理想线性假设的电机行为,例如磁饱和、逆变器死区时间和轴间交叉耦合。这些效应导致电机参数(如电感、转矩常量和磁链)随电流、转速和工作点变化。基本控制设计中使用的线性模型无法在整个工作范围内准确表示这些变化。因此,非线性表征提供电机在真实条件下实际行为的更逼真描述。
如果不考虑非线性,控制器可能会出现转矩误差、效率降低、低速性能差或在大电流下不稳定。在非线性电机控制中,通常使用查找表 (LUT) 来存储通过实验测量或辨识得到的电机参数(例如磁链和电感),这些参数是关于转速和电流的函数;同时还可以包含诸如最优参考电流等计算量。在工作期间,控制器访问 LUT 以实时补偿非线性行为;与纯线性控制方法相比,它能够实现更精确的转矩控制、更高的效率和更稳健的性能。
函数
mcb.generateMotorLUT | Generate lookup tables for motor parameters (自 R2022b 起) |
mcb.PMSMMaxSpeed | Calculate maximum speed of PMSM (自 R2022b 起) |
mcb.PMSMRatedTorque | Calculate rated torque of PMSM (自 R2022b 起) |
mcb.PMSMSpeeds | Calculate milestone speeds of PMSM (自 R2022b 起) |
mcb.calcPMSMVdVq | Calculate d and q axis voltages from PMSM parameters, operating currents, and electric speed (自 R2022b 起) |
mcb.updatePMSMLdLqFluxPM | Update PMSM inductance and flux parameters (自 R2022b 起) |
模块
主题
- Determine Nonlinear Behavior of PMSM Using Characterization Test Data
Build realistic closed-loop simulation of PMSM using characterization test data and obtain nonlinear operating characteristics.
精选示例
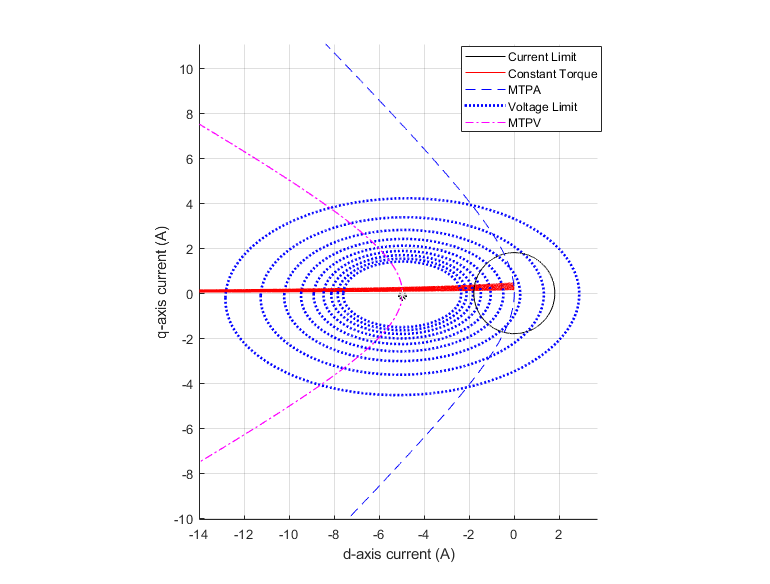
PMSM Drive Characteristics and Constraint Curves
Uses Motor Control Blockset™ to show how to use the PMSM characteristic plotting and PMSM milestone speed identification functions to obtain a control trajectory.
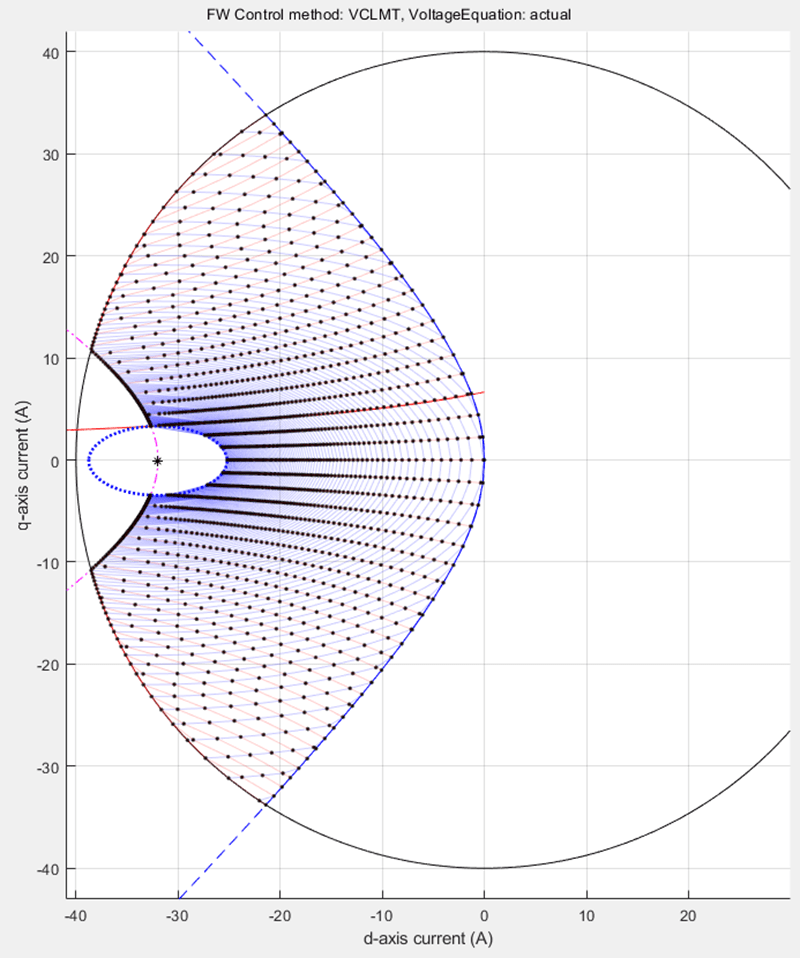
PMSM Constraint Curves and Their Application
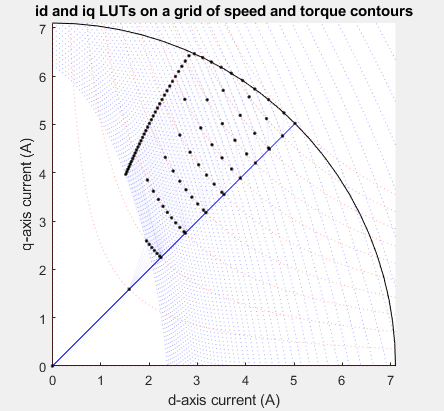
Uses Motor Control Blockset™ to explain the fundamentals of constraint curves, utilization of these curves to determine operating currents, and usage of the grid of these currents in simulation or deployment environments.
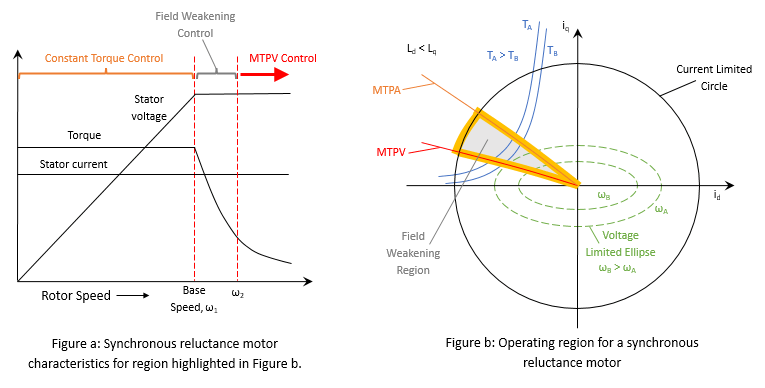
SynRM Constraint Curves and Their Application
Uses Motor Control Blockset™ to utilize the motor constraint curves to determine the operating currents and use lookup tables of these currents in simulation or deployment environments. The example uses the PMSM constraint curves described in the PMSM Drive Characteristics and Constraint Curves page.
Field-Weakening Control (with MTPA) of Nonlinear PMSM Using Lookup Table
Uses a lookup table (LUT) for a nonlinear permanent magnet synchronous motor (PMSM) and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity PMSM in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.
Field-Weakening Control (with MTPA) of Nonlinear Synchronous Reluctance Motors Using Lookup Table
Uses a lookup table (LUT) for a nonlinear synchronous reluctance motor and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity synchronous reluctance motor in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.