PMSM Configuration
库:
Motor Control Blockset HDL Support /
Electrical Systems /
Motors
描述
PMSM Configuration 模块生成永磁同步电机/电机 (PMSM) 的配置信号。您可以使用此信号来更新支持 FPGA 部署的 PMSM 模块的参数,例如 PMSM HDL 模块。
示例
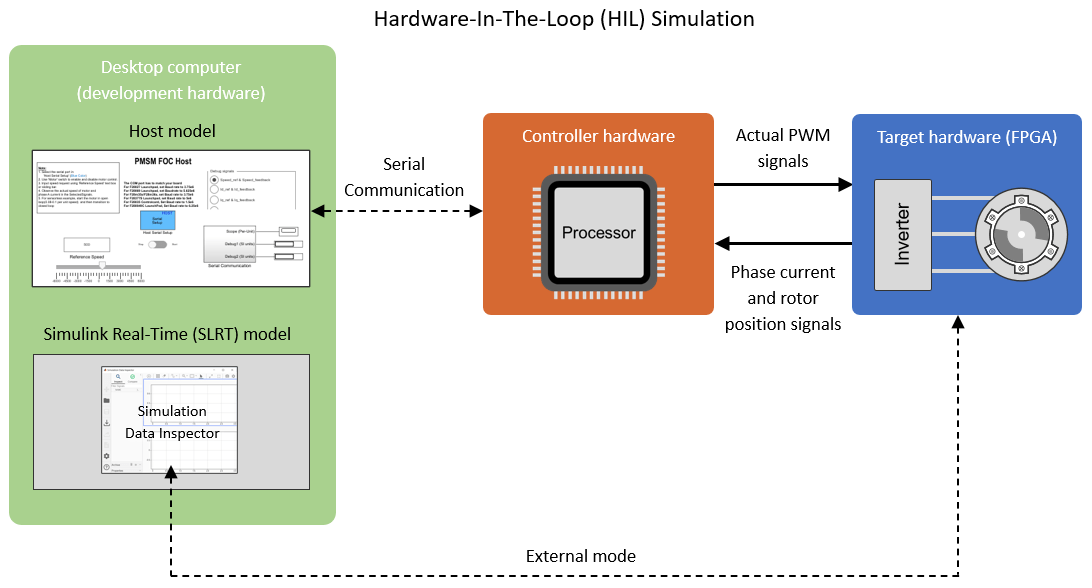
Field-Oriented Control (FOC) of PMSM Using Hardware-in-the-Loop (HIL) Simulation
Uses hardware-in-the-loop (HIL) simulation to implement the field-oriented control (FOC) algorithm to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a quadrature encoder sensor. For more information on FOC, see 磁场定向控制.
端口
输出
参数
版本历史记录
在 R2022b 中推出