Control Underactuated Two-Link Robot Using C/GMRES Solver
This example shows how to control an underactuated two-link robot (commonly called a pendubot) using a Multistage Nonlinear Model Predictive Controller (NMPC) that solves the optimization problem with the C/GMRES solver.
Nonlinear Model
The Pendubot is an underactuated two-link planar robot with actuation only at the shoulder joint. The system is described by four state variables: two joint angles (and ) and their respective angular velocities ( and ). The control input, , is the torque applied at the shoulder joint.
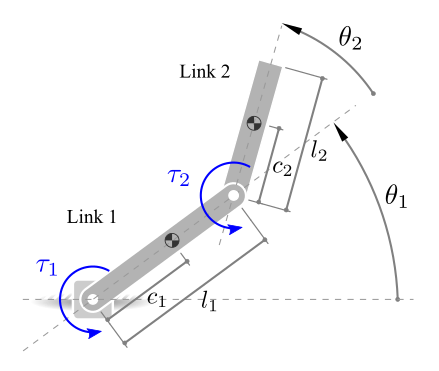
The state of the system consists of the joint angles and angular velocities .The system has one control input, . The dynamics of the system are derived using Euler-Lagrange equations and include inertial, Coriolis, and gravitational terms.
This robot dynamics is implemented in Pendubot.stateFcn.m. This file is a MATLAB® function that takes as inputs the state vector, , the control input vector, , and a vector of model parameters, . The function's output is the vector of the state derivatives with respect to time.
The physical parameters of the robot are defined in the following table:
Parameter | Value | Units | Description |
|---|---|---|---|
0.15 | Distance to the center of mass of the first link. | ||
0.257 | Distance to the center of mass of the second link. | ||
0.3 | Length of the first link. | ||
0.2 | Mass of the first link. | ||
0.7 | Mass of the second link. | ||
0.006 | Moment of inertia of the first link. | ||
0.051 | Moment of inertia of the second link. | ||
9.80665 | Gravitational acceleration. |
Define model parameter vector:
pvstate = [0.15; 0.257; 0.3; 0.2; 0.7; 0.006; 0.051; 9.80665];
Control Objective
The control objective is twofold:
1. Swing-up Phase: Drive the robot from its stable downward equilibrium to the unstable upright equilibrium.
2. Stabilization Phase: Maintain both links upright (, ) with zero velocity.
Define initial state and reference state position:
% Initial state x0 = zeros(4,1); % Reference state (upright position) xref = [pi; 0; 0; 0];
Create a custom chart object for animation, and use initial state and reference state position.
hPlot = RobotEnvironment( ... Length1 = pvstate(3), ... Length2 = pvstate(3)); % Set Initial angular position and desired state. hPlot.Theta1 = x0(1)-pi/2; hPlot.Theta2 = x0(2); hPlot.xf = xref - [pi/2;0;0;0];
To achieve this, define a nonlinear cost function that penalizes deviations from the target state and large control inputs. For this example, the control strategy involves optimizing the performance index, , over a finite time horizon and is given by:
where:
represents the desired state.
, , and are weight matrices that determine the importance of different terms in the performance index.
For this example, the weights and objective cost are implemented in the file Pendubot.m, where , and .
Create Multistage NMPC Object
Create a nonlinear multistage MPC object with four states and one input.
% Create an NMPC object with 50 stages, 4 states, and 1 input p = 50; msobj = nlmpcMultistage(p,4,1); % Set the control interval msobj.Ts = 1/50; % Specify the state transition function msobj.Model.StateFcn = "Pendubot.stateFcn"; msobj.Model.StateJacFcn = "Pendubot.stateJacobianFcn"; % Set running cost for the Multistage NLMPC problem [msobj.Stages(1:p).CostFcn] = deal("Pendubot.runningCostFcn"); [msobj.Stages(1:p).CostJacFcn] = deal("Pendubot.runningCostJacobianFcn"); % Set terminal cost for the Multistage NLMPC problem msobj.Stages(p+1).CostFcn = "Pendubot.terminalCostFcn"; msobj.Stages(p+1).CostJacFcn = "Pendubot.terminalCostJacobianFcn"; % Specify number of parameters for model and stage functions msobj.Model.ParameterLength = length(pvstate); [msobj.Stages.ParameterLength] = deal(4);
Setting the Optimization Solver
For this example, set the multistage MPC object to use the cgmres solver.
msobj.Optimization.Solver = "cgmres"; msobj.Optimization.SolverOptions.MaxIterations = 5; msobj.Optimization.SolverOptions.Restart = 0; msobj.Optimization.SolverOptions.ConvergenceRate = 1.5; msobj.Optimization.SolverOptions.ShootingMethod = "multiple-shooting";
Code Generation
Generate data structures using getCodeGenerationData.
[coredata, onlinedata] = getCodeGenerationData(msobj,x0,0, ...
StateFcnParameter=pvstate, StageParameter=repmat(xref,p+1,1));Generate a MEX function called nlmpcControllerMEX.
buildMEX(msobj, "nlmpcControllerMEX", coredata, onlinedata);Generating MEX function "nlmpcControllerMEX" from your "nlmpcMultistage" object to speed up simulation. Code generation successful. MEX function "nlmpcControllerMEX" successfully generated.
Closed Loop Simulation
Simulate the closed-loop performance by integrating the plant forward in time using the state equations and applying the control input returned by the controller at each step.
FinalTime = 6; % Simulation duration x = x0; % Initialize state mv = 0; % Initialize control input Ts = 1e-3; % Sampling time for simulation % Initialize data storage N = FinalTime/Ts; tHistory = 0:Ts:FinalTime; xHistory = zeros(N+1,4); uHistory = zeros(N+1,1); % Main simulation loop for ct = 0:N % Compute optimal control move [mv,onlinedata,info] = nlmpcControllerMEX(x, mv, onlinedata); % Update plant state (Euler update) x = x + Pendubot.stateFcn(x,mv,pvstate)*Ts; % Store results xHistory(ct+1,:) = x; uHistory(ct+1,:) = mv; % Update underactuated two-link robot plot. hPlot.Theta1 = xHistory(ct+1,1)-pi/2; hPlot.Theta2 = xHistory(ct+1,2); drawnow limitrate end
Plot the joint angles over time to visualize the swing-up and stabilization behavior.
figure;
tiledlayout(2,2);
labels = {"\theta_1","\theta_2","\dot{\theta}_1","\dot{\theta}_2"};
for i=1:4
nexttile();
hold on;
plot(0:Ts:FinalTime, xHistory(:,i));
plot([0 FinalTime], [xref(i) xref(i)]);
% Plot Settings
xlabel("Time, s");
title(sprintf("State %d",i));
ylabel(sprintf("$%s(t)$",labels{i}),Interpreter="latex");
legend(sprintf("$x_%d$",i),sprintf("$\\bar{x}_%d$",i),Interpreter="latex");
end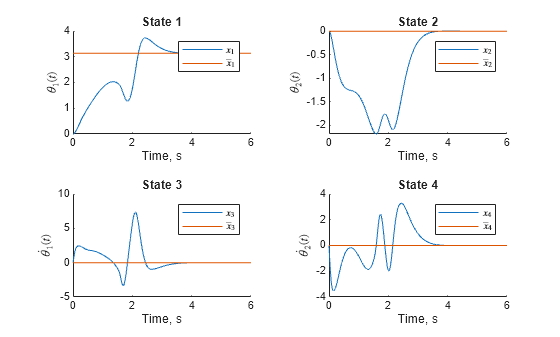
The pendubot swings up and stabilizes around the upright configuration within a few seconds. The MPC controller successfully handles the nonlinear, underactuated dynamics using only a single actuator.
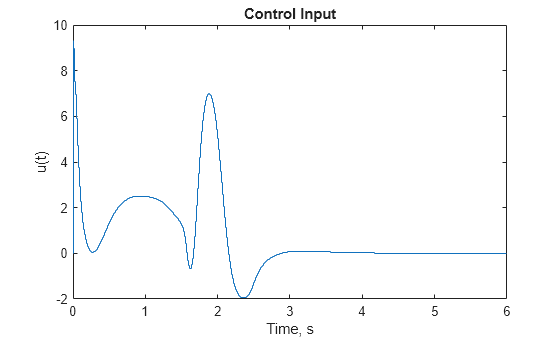
figure; stairs(0:Ts:FinalTime, uHistory); title("Control Input"); xlabel("Time, s"); ylabel("u(t)");
References
[1] Ohtsuka, T. “Continuation/GMRES Method for Fast Algorithm of Nonlinear Receding Horizon Control.” Proceedings of the 39th IEEE Conference on Decision and Control (Cat. No.00CH37187), vol. 1, 2000, pp. 766–71 vol.1. IEEE Xplore, https://doi.org/10.1109/CDC.2000.912861.
See Also
Functions
generateJacobianFunction|validateFcns|nlmpcmove|nlmpcmoveCodeGeneration|getSimulationData|getCodeGenerationData
Objects
Blocks
Topics
- Landing a Vehicle Using Multistage Nonlinear MPC
- Truck and Trailer Automatic Parking Using Multistage Nonlinear MPC
- Solve Fuel-Optimal Navigation Problem Using C/GMRES
- Control Robot Manipulator Using C/GMRES Solver
- Swing-Up Control of Cart-Pole System Using C/GMRES Solver
- Nonlinear MPC
- Configure Optimization Solver for Nonlinear MPC
- Create Nonlinear MPC Code Generation Structures
- Specify Cost Function for Nonlinear MPC