gpsdev
Connect to a GPS receiver connected to host computer
Description
The gpsdev
System object™ connects to a GPS receiver connected to the host computer.
To connect to a GPS receiver:
Create the
gpsdevobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
gps = gpsdev(___,Name=Value)gps =
gpsdev("COM4",SamplesPerRead=2) sets samples per read to 2.
Input Arguments
Properties
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
flush | Flush all GPS data accumulated in the buffers and reset properties |
info | Read update rate, GPS lock information and number of satellites in view for the GPS receiver |
read | Read data from GPS receiver |
release | Release the GPS object |
writeBytes | Write raw commands to the GPS receiver |
Examples
Get the geographic location using the GPS receiver connected to the host computer on a specific serial port and plot the location in a map.
Required Hardware
To run this example, you need:
UBlox Neo-6M GPS module
GPS antenna
USB to UART module
USB cable
Connecting wires
Hardware Connection
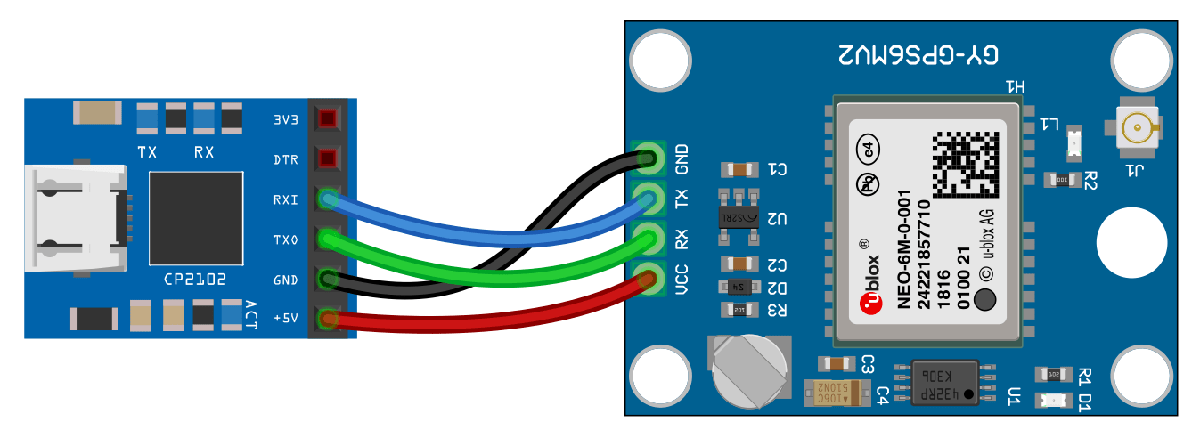
Connect the pins on the UBlox Neo-6M GPS module to the pins on your USB to UART module. The connections are:
VCC - +5V
RX - TXO
TX - RXI
GND - GND
Connect the GPS antenna to the GPS module. Connect the USB to UART module to the host computer with a USB cable. GPS Fix can be easily acquired in locations that have a clear view of the sky. Wait for the GPS module to acquire satellite signals (Fix).This can be verified by checking the Fix LED (D1) of your GPS module.
Create GPS Object
Create a gpsdev object for the GPS module connected to a specific port.
gps = gpsdev('COM4')gps =
gpsdev with properties:
SerialPort: COM4
BaudRate: 9600 (bits/s)
SamplesPerRead: 1
ReadMode: "latest"
SamplesRead: 0
Show all properties all functions
Read the GPS data
Read the GPS data and extract latitude, longitude, and time from it. GPS returns UTC datetime. Convert it to system time zone.
[gpsData,~] = read(gps);
latitude = gpsData.LLA(1);
longitude = gpsData.LLA(2);
gpsTime = gpsData.GPSReceiverTime;
gpsTime.TimeZone = 'local';Plot the position in a map along with the timestamp
Plot the position in geographic axes with the data obtained from the GPS module. GPS should have fix to get valid values for latitude, longitude and gpsTime.
If the GPS module does not have fix, the above commands give NaNs for latitude and longitude and NaT for gpsTime. In this case, make sure the antenna is exposed to clear sky and wait for some time and try the above steps again.
if(~isnan(latitude) && ~isnan(longitude)) % plot the position in geographic coordinates fig = geoplot(latitude,longitude,'Marker',"o",'MarkerSize',6,'Color','red','MarkerFaceColor','red'); % Sets the latitude and longitude limits of the base Map geolimits([latitude-0.05 latitude+0.05],[longitude-0.05 longitude+0.05]) ; % Selects the basemap geobasemap streets; timeString = strcat("Timestamp: ",string(gpsTime)); % Create annotation and display time received from GPS annotation('textbox',[0.005 0.98 0.6 0.01],'FitBoxToText','on','string',timeString,'Color','blue','FontSize',10); end
Clean Up
When the connection is no longer needed, clear the associated object.
delete(gps);
clear gps;Write configuration commands to the GPS receiver connected to the host computer using serialport object.
Required Hardware
To run this example, you need:
UBlox Neo-6M GPS module
GPS antenna
USB to UART module
USB cable
Connecting wires
Hardware Connection
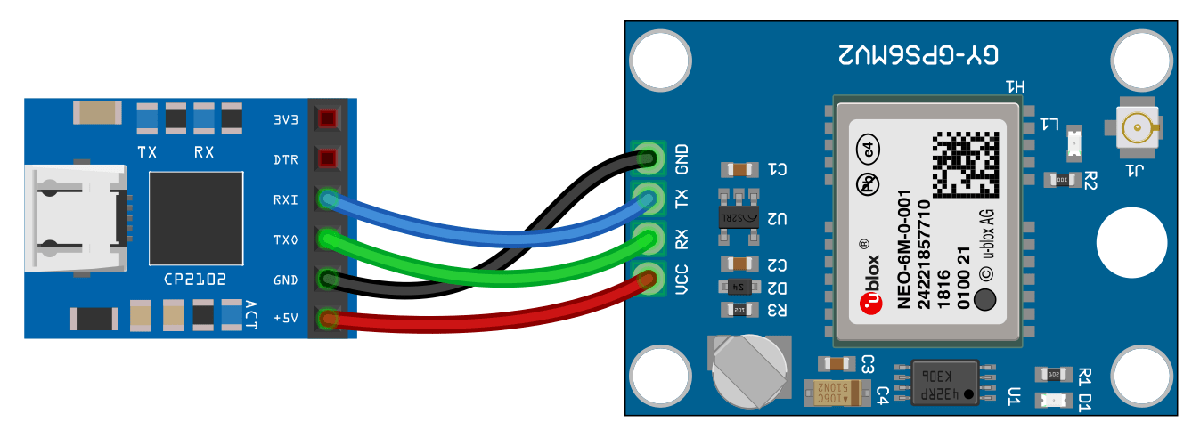
Connect the pins on the UBlox Neo-6M GPS module to the pins on your USB to UART module. The connections are:
VCC - +5V
RX - TXO
TX - RXI
GND - GND
Connect the GPS antenna to the GPS module. Connect the USB to UART module to the host computer with a USB cable. GPS Fix can be easily acquired in locations that have a clear view of the sky. Wait for the GPS module to acquire satelite signals (Fix).This can be verified by checking the Fix LED (D1) of your GPS module.
Create GPS Object
Connect to the GPS receiver using serialport object. Specify the port name and the baud rate.
s = serialport('COM4',9600)s =
Serialport with properties:
Port: "COM4"
BaudRate: 9600
NumBytesAvailable: 0
Show all properties, functions
gps = gpsdev(s)
gps =
gpsdev with properties:
SerialPort: COM4
BaudRate: 9600 (bits/s)
SamplesPerRead: 1
ReadMode: "latest"
SamplesRead: 0
Show all properties all functions
Write Configuration Commands
In the default configuration the GPS receiver returns the following NMEA messages: GPRMC, GPVTG, GPGGA, GPGSA, GPGSV, and GPGLL. The receiver can be configured to have a user defined set of output messages.
Read few lines of default messages from the serial port the GPS receiver is connected.
for i = 1:10 data = readline(s); disp(data); end
$GPRMC,,V,,,,,,,,,,N*53 $GPVTG,,,,,,,,,N*30 $GPGGA,,,,,,0,00,99.99,,,,,,*48 $GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30 $GPGSV,2,1,08,01,,,18,08,,,12,09,,,12,15,,,19*77 $GPGSV,2,2,08,23,,,13,24,,,09,25,,,10,27,,,25*79 $GPGLL,,,,,,V,N*64 $GPRMC,,V,,,,,,,,,,N*53 $GPVTG,,,,,,,,,N*30 $GPGGA,,,,,,0,00,99.99,,,,,,*48
Write the version monitor command to the GPS receiver to return the software and hardware version of the GPS receiver.
configCMD = [0xB5 0x62 0x0A 0x04 0x00 0x00 0x0E 0x34]; % writeBytes(gps,cfg) write(s,configCMD,'uint8')
Read few lines of messages again to verify the version message.
for i = 1:10 data = readline(s); disp(data); end
$GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30 $GPGSV,2,1,05,01,,,13,09,,,11,15,,,16,23,,,12*74 $GPGSV,2,2,05,25,,,10*7A $GPGLL,,,,,,V,N*64 µb ( 7.03 (45969) 00040007 °$GPRMC,,V,,,,,,,,,,N*53 $GPVTG,,,,,,,,,N*30 $GPGGA,,,,,,0,00,99.99,,,,,,*48 $GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30 $GPGSV,2,1,06,01,,,11,09,,,11,23,,,14,24,,,21*75
It can be observed from the output, 7.03 (45969) is the software version and 00040007 is the hardware version.
Clean Up
When the connection is no longer needed, clear the associated object.
delete(gps); clear gps; clear s;
Read data from the GPS receiver connected to the host computer on a specific serial port.
Required Hardware
To run this example, you need:
UBlox Neo-6M GPS module
GPS antenna
USB to UART module
USB cable
Connecting wires
Hardware Connection
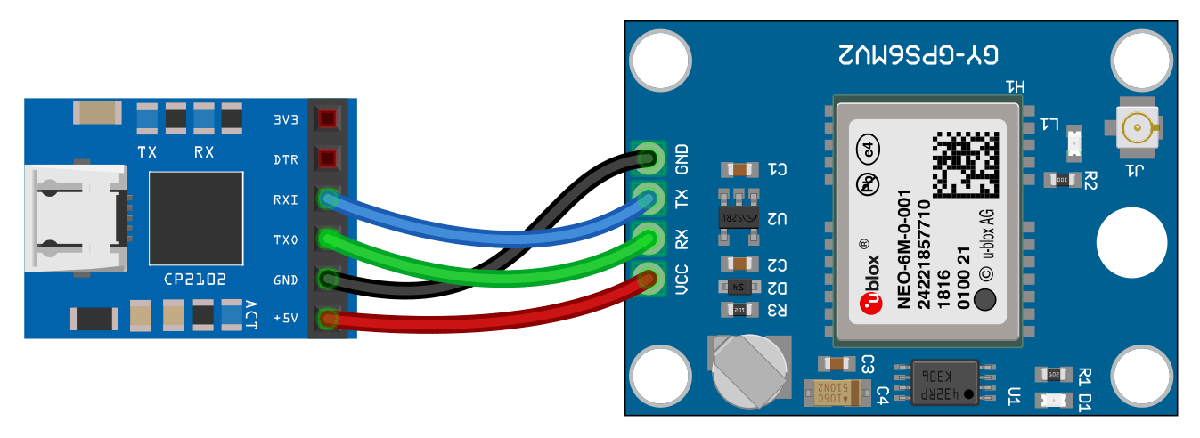
Connect the pins on the UBlox Neo-6M GPS module to the pins on your USB to UART module. The connections are:
VCC - +5V
RX - TXO
TX - RXI
GND - GND
Connect the GPS antenna to the GPS module. Connect the USB to UART module to the host computer with a USB cable. GPS Fix can be easily acquired in locations that have a clear view of the sky. Wait for the GPS module to acquire satellite signals (Fix). This can be verified by checking the Fix LED (D1) of your GPS module.
Create GPS Object
Create a gpsdev object for the GPS receiver connected to a specific port. Specify the output format of the data as a timetable.
gps = gpsdev('COM4','OutputFormat',"timetable")
gps =
gpsdev with properties:
SerialPort: COM4
BaudRate: 9600 (bits/s)
SamplesPerRead: 1
ReadMode: "latest"
SamplesRead: 0
Show all properties all functions
Read the GPS Data
Read the GPS data and return them as a timetable.
[tt,overruns] = read(gps)
tt=1×5 timetable
22-Mar-2021 15:31:15.190 17.4701,78.3434,449.6000 0.2562 NaN 9.3100,1.4800,9.1900 22-Mar-2021 10:01:14.000
overruns = 0
Display number of samples read and the samples available in the host buffer.
gps.SamplesRead
ans = 1
gps.SamplesAvailable
ans = 0
Release the GPS object to configure the non tunable properties. The release function also clears the buffer and resets the SamplesRead and SamplesAvailable properties.
release(gps)
Specify the number of samples per read to 2. Read the GPS data.
gps.SamplesPerRead = 2; read(gps)
ans=2×5 timetable
22-Mar-2021 15:31:17.178 17.4701,78.3434,450 0.0638 NaN 9.3200,1.4800,9.2000 22-Mar-2021 10:01:16.000
22-Mar-2021 15:31:17.178 17.4701,78.3434,450 0.0638 NaN 9.3200,1.4800,9.2000 22-Mar-2021 10:01:16.000
Display number of samples read and the samples available in the host buffer.
gps.SamplesRead
ans = 1
gps.SamplesAvailable
ans = 0
Clean Up
When the connection is no longer needed, clear the associated object.
delete(gps);
clear gps;More About
Version History
Introduced in R2020b