removeLoopClosures
Remove loop closures from pose graph
Description
Examples
Load laser scan data from a file.
load("offlineSlamData.mat");To set up the SLAM algorithm:
Specify the lidar range, map resolution, loop closure threshold, and search radius.
Tune these parameters for your specific robot and environment.
Create the
lidarSLAMobject with these parameters.
maxLidarRange = 8; mapResolution = 20; slamObj = lidarSLAM(mapResolution,maxLidarRange); slamObj.LoopClosureThreshold = 210; slamObj.LoopClosureSearchRadius = 8;
Add scans iteratively to the SLAM object.
for i = 1:numel(scans) addScan(slamObj,scans{i}); end
Create a copy of the SLAM object. Display the underlying pose graph of the SLAM object.
slamObj2 = copy(slamObj); slamObj2.PoseGraph
ans =
poseGraph with properties:
NumNodes: 71
NumEdges: 83
NumLoopClosureEdges: 13
LoopClosureEdgeIDs: [31 36 63 65 67 69 71 73 75 77 79 81 83]
LandmarkNodeIDs: [1×0 double]
Remove the first two loop closures by specifying their edge IDs.
lcEdgeIDs = slamObj2.PoseGraph.LoopClosureEdgeIDs(1:2); removeLoopClosures(slamObj2,lcEdgeIDs)
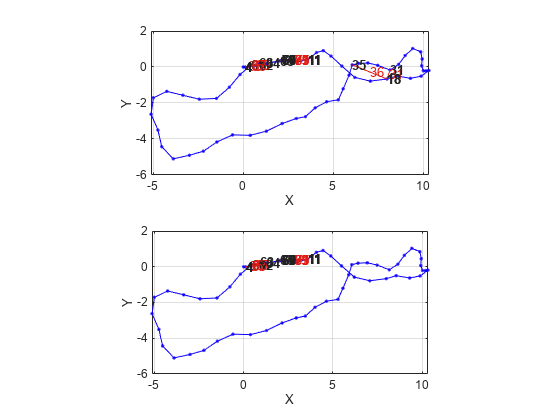
Plot the pose graphs of the SLAM object before and after removing the loop closures.
subplot(2,1,1) show(slamObj.PoseGraph); subplot(2,1,2) show(slamObj2.PoseGraph);
Input Arguments
Extended Capabilities
Version History
Introduced in R2019b