plan
Description
Examples
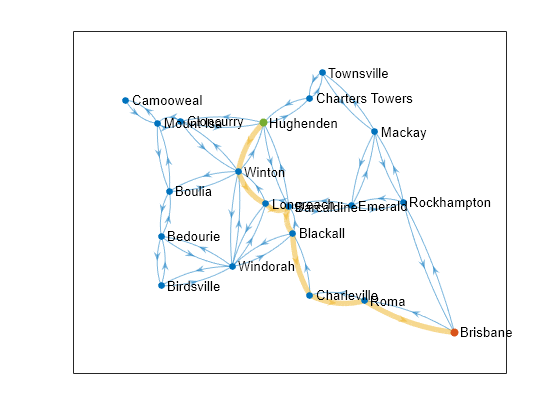
Load the Queensland road network.
load("queenslandRoutes","places","routes")
Specify states, links, and weights for a navGraph object.
states = places.utm; % UTM coordinates of cities names = places.name; % Names of cities links = [routes.start routes.end]; % Adjacent cities weights = routes.time; % Travel time between adjacent cities
Create a navGraph object.
graphObj = navGraph(states,links,Weight=weights, ...
Name=names);Create a graph-based A* path planner.
planner = plannerAStar(graphObj);
Create a deep copy of the plannerAStar object.
planner2 = copy(planner)
planner2 =
plannerAStar with properties:
HeuristicCostFcn: @nav.algs.distanceManhattan
TieBreaker: 0
Graph: [1×1 navGraph]
Specify a heuristic function returns an estimated time to reach the goal.
planner.HeuristicCostFcn = @(state1,state2) ...
sum(abs(state1-state2),2)/100;Define the start and goal cities.
start = "Hughenden"; goal = "Brisbane";
Find the shortest path using the graph-based A* algorithm.
[pathOutput,solutionInfo] = plan(planner,start,goal);
Visualize the results.
h = show(graphObj); set(h,XData=graphObj.States.StateVector(:,1), ... YData=graphObj.States.StateVector(:,2)) pathStateIDs = solutionInfo.PathStateIDs; highlight(h,pathStateIDs,EdgeColor="#EDB120",LineWidth=4) highlight(h,pathStateIDs(1),NodeColor="#77AC30",MarkerSize=5) highlight(h,pathStateIDs(end),NodeColor="#D95319",MarkerSize=5)
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2023a