connect
Connect initial and terminal Frenet states
Syntax
Description
frenetTrajectory = connect(connectorFrenet,initialState,terminalState,timeSpan)
[___,
returns the trajectories in global coordinates in addition to all arguments in the previous
syntax.globalTrajectory] = connect(___)
Examples
Generate alternative trajectories for a reference path using Frenet coordinates. Specify different initial and terminal states for your trajectories. Tune your states based on the generated trajectories.
Generate a reference path from a set of waypoints. Create a trajectoryGeneratorFrenet object from the reference path.
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
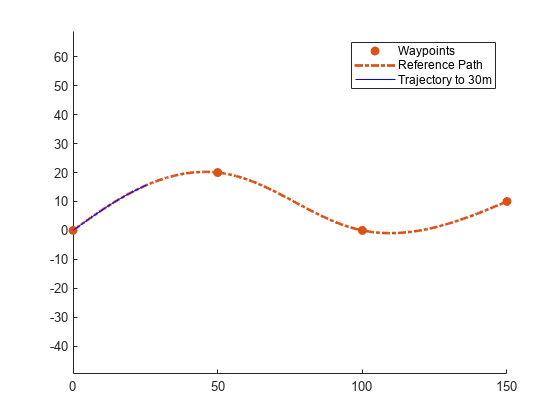
Generate a five-second trajectory between the path origin and a point 30 m down the path as Frenet states.
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
Display the trajectory in global coordinates.
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])
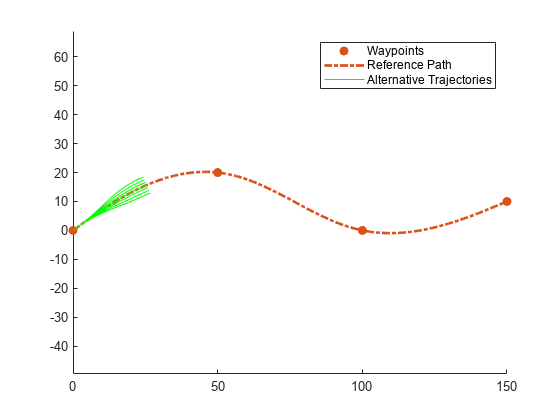
Create a matrix of terminal states with lateral deviations between –3 m and 3 m. Generate trajectories that cover the same arc length in 10 seconds, but deviate laterally from the reference path. Display the new alternative paths.
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,10); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off
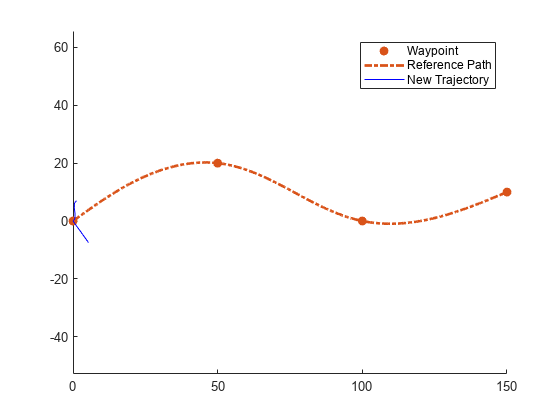
Specify a new terminal state to generate a new trajectory. This trajectory is not desirable because it requires reverse motion to achieve a longitudinal velocity of 10 m/s.
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off
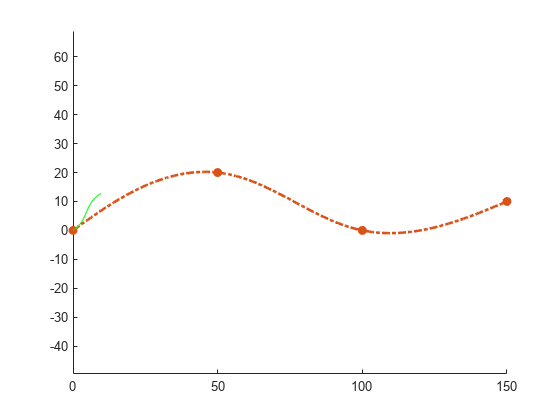
Relax the restriction on the longitudinal state by specifying an arc length of NaN. Generate and display the trajectory again. The new position shows a good alternative trajectory that deviates off the reference path.
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off
Input Arguments
Output Arguments
Frenet trajectories between all initial and final states, returned as a structure array with these fields:
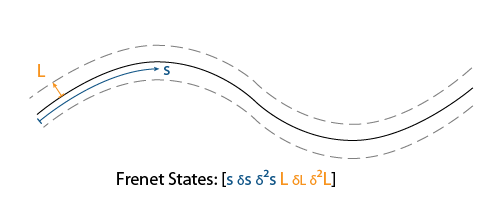
Trajectory— n-by-6 numeric matrix. Each row of the matrix is a set of Frenet coordinates for the initial state of a trajectory in the form[S dS ddS L dL ddL].Time— Vector of positive scalars from0totimeSpanin seconds.
This function supports 1-to-n,
n-to-1, or n-to-n pairwise
trajectory connections based on the number of rows of initialState
and terminalState.
Global trajectories between all initial and final states, returned as structure or structure array with fields:
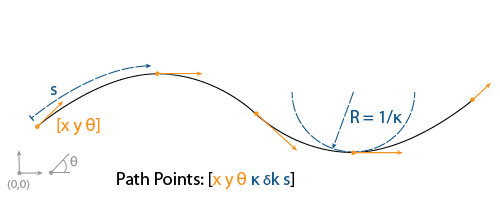
Trajectory— n-by-6 numeric matrix. Each row of the matrix is a set of global sates of the form[x y theta kappa v a].Time— Vector of positive scalars from0totimeSpanin seconds.
This function supports 1-to-n,
n-to-1, or n-to-n pairwise
trajectory connections based on the number of rows of initialState
and terminalState.
Extended Capabilities
Version History
Introduced in R2020b