tunerconfig
Fusion filter tuner configuration options
Description
The tunerconfig object creates a tuner configuration for a fusion
filter used to tune the filter for reduced estimation error.
Creation
Syntax
Description
config = tunerconfig(filterName)tunerconfig object controlling the optimization algorithm of
the tune function of the fusion filter by specifying a filter name.
config = tunerconfig(filter)tunerconfig object controlling the optimization algorithm of
the tune function of the fusion filter by specifying a filter object.
config = tunerconfig(filterName,Name,Value)tunerconfig object properties using one or more
name-value pair arguments. Name is a property name and
Value is the corresponding value. Name must appear
inside quotes. You can specify several name-value pair arguments in any order as
Name1,Value1,...,NameN,ValueN. Any unspecified properties take
default values.
For example, tunerconfig('imufilter','MaxIterations',3) create a
tunerconfig object for the imufilter object with the a
maximum of three allowed iterations.
Input Arguments
Properties
Examples
Create a tunerconfig object for the insfilterAsync object.
config = tunerconfig('insfilterAsync')config =
tunerconfig with properties:
Filter: "insfilterAsync"
TunableParameters: ["AccelerometerNoise" "GyroscopeNoise" "MagnetometerNoise" "GPSPositionNoise" "GPSVelocityNoise" "QuaternionNoise" "AngularVelocityNoise" "PositionNoise" "VelocityNoise" … ] (1×14 string)
StepForward: 1.1000
StepBackward: 0.5000
MaxIterations: 20
ObjectiveLimit: 0.1000
FunctionTolerance: 0
Display: iter
Cost: RMS
OutputFcn: []
Display the default tunable parameters.
config.TunableParameters
ans = 1×14 string
"AccelerometerNoise" "GyroscopeNoise" "MagnetometerNoise" "GPSPositionNoise" "GPSVelocityNoise" "QuaternionNoise" "AngularVelocityNoise" "PositionNoise" "VelocityNoise" "AccelerationNoise" "GyroscopeBiasNoise" "AccelerometerBiasNoise" "GeomagneticVectorNoise" "MagnetometerBiasNoise"
Load the recorded sensor data and ground truth data.
load('insfilterAsyncTuneData.mat');Create timetables for the sensor data and the truth data.
sensorData = timetable(Accelerometer, Gyroscope, ... Magnetometer, GPSPosition, GPSVelocity, 'SampleRate', 100); groundTruth = timetable(Orientation, Position, ... 'SampleRate', 100);
Create an insfilterAsync filter object that has a few noise properties.
filter = insfilterAsync('State', initialState, ... 'StateCovariance', initialStateCovariance, ... 'AccelerometerBiasNoise', 1e-7, ... 'GyroscopeBiasNoise', 1e-7, ... 'MagnetometerBiasNoise', 1e-7, ... 'GeomagneticVectorNoise', 1e-7);
Create a tuner configuration object for the filter. Set the maximum iterations to two. Also, set the tunable parameters as the unspecified properties.
config = tunerconfig('insfilterAsync','MaxIterations',8); config.TunableParameters = setdiff(config.TunableParameters, ... {'GeomagneticVectorNoise', 'AccelerometerBiasNoise', ... 'GyroscopeBiasNoise', 'MagnetometerBiasNoise'}); config.TunableParameters
ans = 1×10 string array
"AccelerationNoise" "AccelerometerNoise" "AngularVelocityNoise" "GPSPositionNoise" "GPSVelocityNoise" "GyroscopeNoise" "MagnetometerNoise" "PositionNoise" "QuaternionNoise" "VelocityNoise"
Use the tuner noise function to obtain a set of initial sensor noises used in the filter.
measNoise = tunernoise('insfilterAsync')measNoise = struct with fields:
AccelerometerNoise: 1
GyroscopeNoise: 1
MagnetometerNoise: 1
GPSPositionNoise: 1
GPSVelocityNoise: 1
Tune the filter and obtain the tuned parameters.
tunedParams = tune(filter,measNoise,sensorData,groundTruth,config);
Iteration Parameter Metric
_________ _________ ______
1 AccelerationNoise 2.1345
1 AccelerometerNoise 2.1264
1 AngularVelocityNoise 1.9659
1 GPSPositionNoise 1.9341
1 GPSVelocityNoise 1.8420
1 GyroscopeNoise 1.7589
1 MagnetometerNoise 1.7362
1 PositionNoise 1.7362
1 QuaternionNoise 1.7218
1 VelocityNoise 1.7218
2 AccelerationNoise 1.7190
2 AccelerometerNoise 1.7170
2 AngularVelocityNoise 1.6045
2 GPSPositionNoise 1.5948
2 GPSVelocityNoise 1.5323
2 GyroscopeNoise 1.4803
2 MagnetometerNoise 1.4703
2 PositionNoise 1.4703
2 QuaternionNoise 1.4632
2 VelocityNoise 1.4632
3 AccelerationNoise 1.4596
3 AccelerometerNoise 1.4548
3 AngularVelocityNoise 1.3923
3 GPSPositionNoise 1.3810
3 GPSVelocityNoise 1.3322
3 GyroscopeNoise 1.2998
3 MagnetometerNoise 1.2976
3 PositionNoise 1.2976
3 QuaternionNoise 1.2943
3 VelocityNoise 1.2943
4 AccelerationNoise 1.2906
4 AccelerometerNoise 1.2836
4 AngularVelocityNoise 1.2491
4 GPSPositionNoise 1.2258
4 GPSVelocityNoise 1.1880
4 GyroscopeNoise 1.1701
4 MagnetometerNoise 1.1698
4 PositionNoise 1.1698
4 QuaternionNoise 1.1688
4 VelocityNoise 1.1688
5 AccelerationNoise 1.1650
5 AccelerometerNoise 1.1569
5 AngularVelocityNoise 1.1454
5 GPSPositionNoise 1.1100
5 GPSVelocityNoise 1.0778
5 GyroscopeNoise 1.0709
5 MagnetometerNoise 1.0675
5 PositionNoise 1.0675
5 QuaternionNoise 1.0669
5 VelocityNoise 1.0669
6 AccelerationNoise 1.0634
6 AccelerometerNoise 1.0549
6 AngularVelocityNoise 1.0549
6 GPSPositionNoise 1.0180
6 GPSVelocityNoise 0.9866
6 GyroscopeNoise 0.9810
6 MagnetometerNoise 0.9775
6 PositionNoise 0.9775
6 QuaternionNoise 0.9768
6 VelocityNoise 0.9768
7 AccelerationNoise 0.9735
7 AccelerometerNoise 0.9652
7 AngularVelocityNoise 0.9652
7 GPSPositionNoise 0.9283
7 GPSVelocityNoise 0.8997
7 GyroscopeNoise 0.8947
7 MagnetometerNoise 0.8920
7 PositionNoise 0.8920
7 QuaternionNoise 0.8912
7 VelocityNoise 0.8912
8 AccelerationNoise 0.8885
8 AccelerometerNoise 0.8811
8 AngularVelocityNoise 0.8807
8 GPSPositionNoise 0.8479
8 GPSVelocityNoise 0.8238
8 GyroscopeNoise 0.8165
8 MagnetometerNoise 0.8165
8 PositionNoise 0.8165
8 QuaternionNoise 0.8159
8 VelocityNoise 0.8159
Fuse the sensor data using the tuned filter.
dt = seconds(diff(groundTruth.Time)); N = size(sensorData,1); qEst = quaternion.zeros(N,1); posEst = zeros(N,3); % Iterate the filter for prediction and correction using sensor data. for ii=1:N if ii ~= 1 predict(filter, dt(ii-1)); end if all(~isnan(Accelerometer(ii,:))) fuseaccel(filter,Accelerometer(ii,:), ... tunedParams.AccelerometerNoise); end if all(~isnan(Gyroscope(ii,:))) fusegyro(filter, Gyroscope(ii,:), ... tunedParams.GyroscopeNoise); end if all(~isnan(Magnetometer(ii,1))) fusemag(filter, Magnetometer(ii,:), ... tunedParams.MagnetometerNoise); end if all(~isnan(GPSPosition(ii,1))) fusegps(filter, GPSPosition(ii,:), ... tunedParams.GPSPositionNoise, GPSVelocity(ii,:), ... tunedParams.GPSVelocityNoise); end [posEst(ii,:), qEst(ii,:)] = pose(filter); end
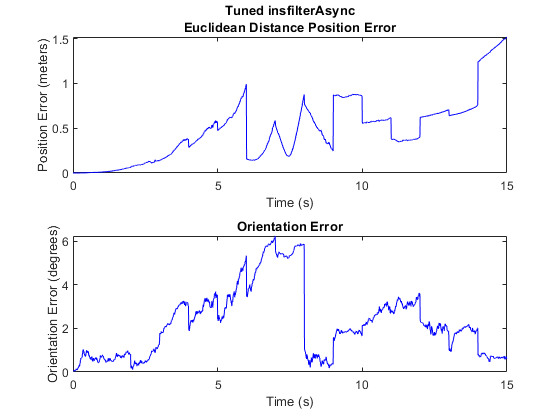
Compute the RMS errors.
orientationError = rad2deg(dist(qEst, Orientation)); rmsorientationError = sqrt(mean(orientationError.^2))
rmsorientationError = 2.7801
positionError = sqrt(sum((posEst - Position).^2, 2)); rmspositionError = sqrt(mean( positionError.^2))
rmspositionError = 0.5966
Visualize the results.
figure(); t = (0:N-1)./ groundTruth.Properties.SampleRate; subplot(2,1,1) plot(t, positionError, 'b'); title("Tuned insfilterAsync" + newline + "Euclidean Distance Position Error") xlabel('Time (s)'); ylabel('Position Error (meters)') subplot(2,1,2) plot(t, orientationError, 'b'); title("Orientation Error") xlabel('Time (s)'); ylabel('Orientation Error (degrees)');
Load recorded sensor data and ground truth data.
ld = load("imufilterTuneData.mat"); qTrue = ld.groundTruth.Orientation; % true orientation
Create an imufilter object and fuse the filter with the sensor data.
fuse = imufilter;
qEstUntuned = fuse(ld.sensorData.Accelerometer, ...
ld.sensorData.Gyroscope);Create a tunerconfig object and tune the imufilter to improve the orientation estimate.
cfg = tunerconfig("imufilter",ObjectiveLimit=0.03);
reset(fuse)
tune(fuse,ld.sensorData,ld.groundTruth,cfg); Iteration Parameter Metric
_________ _________ ______
1 AccelerometerNoise 0.0857
1 GyroscopeNoise 0.0855
1 GyroscopeDriftNoise 0.0855
1 LinearAccelerationNoise 0.0851
1 LinearAccelerationDecayFactor 0.0844
2 AccelerometerNoise 0.0844
2 GyroscopeNoise 0.0842
2 GyroscopeDriftNoise 0.0842
2 LinearAccelerationNoise 0.0840
2 LinearAccelerationDecayFactor 0.0836
3 AccelerometerNoise 0.0836
3 GyroscopeNoise 0.0834
3 GyroscopeDriftNoise 0.0834
3 LinearAccelerationNoise 0.0834
3 LinearAccelerationDecayFactor 0.0831
4 AccelerometerNoise 0.0831
4 GyroscopeNoise 0.0829
4 GyroscopeDriftNoise 0.0829
4 LinearAccelerationNoise 0.0829
4 LinearAccelerationDecayFactor 0.0827
5 AccelerometerNoise 0.0827
5 GyroscopeNoise 0.0824
5 GyroscopeDriftNoise 0.0824
5 LinearAccelerationNoise 0.0824
5 LinearAccelerationDecayFactor 0.0822
6 AccelerometerNoise 0.0822
6 GyroscopeNoise 0.0819
6 GyroscopeDriftNoise 0.0819
6 LinearAccelerationNoise 0.0819
6 LinearAccelerationDecayFactor 0.0818
7 AccelerometerNoise 0.0818
7 GyroscopeNoise 0.0814
7 GyroscopeDriftNoise 0.0814
7 LinearAccelerationNoise 0.0814
7 LinearAccelerationDecayFactor 0.0813
8 AccelerometerNoise 0.0813
8 GyroscopeNoise 0.0808
8 GyroscopeDriftNoise 0.0808
8 LinearAccelerationNoise 0.0808
8 LinearAccelerationDecayFactor 0.0807
9 AccelerometerNoise 0.0807
9 GyroscopeNoise 0.0802
9 GyroscopeDriftNoise 0.0802
9 LinearAccelerationNoise 0.0802
9 LinearAccelerationDecayFactor 0.0801
10 AccelerometerNoise 0.0801
10 GyroscopeNoise 0.0794
10 GyroscopeDriftNoise 0.0794
10 LinearAccelerationNoise 0.0794
10 LinearAccelerationDecayFactor 0.0794
11 AccelerometerNoise 0.0794
11 GyroscopeNoise 0.0785
11 GyroscopeDriftNoise 0.0785
11 LinearAccelerationNoise 0.0785
11 LinearAccelerationDecayFactor 0.0785
12 AccelerometerNoise 0.0785
12 GyroscopeNoise 0.0775
12 GyroscopeDriftNoise 0.0775
12 LinearAccelerationNoise 0.0775
12 LinearAccelerationDecayFactor 0.0774
13 AccelerometerNoise 0.0774
13 GyroscopeNoise 0.0762
13 GyroscopeDriftNoise 0.0762
13 LinearAccelerationNoise 0.0762
13 LinearAccelerationDecayFactor 0.0761
14 AccelerometerNoise 0.0761
14 GyroscopeNoise 0.0746
14 GyroscopeDriftNoise 0.0746
14 LinearAccelerationNoise 0.0746
14 LinearAccelerationDecayFactor 0.0745
15 AccelerometerNoise 0.0745
15 GyroscopeNoise 0.0727
15 GyroscopeDriftNoise 0.0727
15 LinearAccelerationNoise 0.0727
15 LinearAccelerationDecayFactor 0.0726
16 AccelerometerNoise 0.0726
16 GyroscopeNoise 0.0706
16 GyroscopeDriftNoise 0.0706
16 LinearAccelerationNoise 0.0705
16 LinearAccelerationDecayFactor 0.0705
17 AccelerometerNoise 0.0705
17 GyroscopeNoise 0.0684
17 GyroscopeDriftNoise 0.0684
17 LinearAccelerationNoise 0.0683
17 LinearAccelerationDecayFactor 0.0683
18 AccelerometerNoise 0.0683
18 GyroscopeNoise 0.0662
18 GyroscopeDriftNoise 0.0662
18 LinearAccelerationNoise 0.0662
18 LinearAccelerationDecayFactor 0.0662
19 AccelerometerNoise 0.0662
19 GyroscopeNoise 0.0644
19 GyroscopeDriftNoise 0.0644
19 LinearAccelerationNoise 0.0644
19 LinearAccelerationDecayFactor 0.0644
20 AccelerometerNoise 0.0644
20 GyroscopeNoise 0.0630
20 GyroscopeDriftNoise 0.0630
20 LinearAccelerationNoise 0.0630
20 LinearAccelerationDecayFactor 0.0630
Fuse the sensor data again using the tuned filter.
qEstTuned = fuse(ld.sensorData.Accelerometer, ...
ld.sensorData.Gyroscope);Compare the tuned and untuned filter RMS error performances.
dUntuned = rad2deg(dist(qEstUntuned,qTrue)); dTuned = rad2deg(dist(qEstTuned,qTrue)); rmsUntuned = sqrt(mean(dUntuned.^2))
rmsUntuned = 4.9108
rmsTuned = sqrt(mean(dTuned.^2))
rmsTuned = 3.6116
Visualize the results.
N = numel(dUntuned); t = (0:N-1)./ fuse.SampleRate; plot(t,dUntuned,"r",t,dTuned,"b"); legend("Untuned","Tuned"); title("imufilter - Tuned vs Untuned Error") xlabel("Time (s)"); ylabel("Orientation Error (degrees)");

Load the recorded sensor data and ground truth data.
load('insfilterAsyncTuneData.mat');Create timetables for the sensor data and the truth data.
sensorData = timetable(Accelerometer, Gyroscope, ... Magnetometer, GPSPosition, GPSVelocity, 'SampleRate', 100); groundTruth = timetable(Orientation, Position, ... 'SampleRate', 100);
Create an insfilterAsync filter object that has a few noise properties.
filter = insfilterAsync('State', initialState, ... 'StateCovariance', initialStateCovariance, ... 'AccelerometerBiasNoise', 1e-7, ... 'GyroscopeBiasNoise', 1e-7, ... 'MagnetometerBiasNoise', 1e-7, ... 'GeomagneticVectorNoise', 1e-7);
Create a tuner configuration object for the filter. Define the OutputFcn property as a customized function, myOutputFcn, which saves the latest tuned parameters in a MAT file.
config = tunerconfig('insfilterAsync', ... 'MaxIterations',5, ... 'Display','none', ... 'OutputFcn', @myOutputFcn); config.TunableParameters = setdiff(config.TunableParameters, ... {'GeomagneticVectorNoise', 'AccelerometerBiasNoise', ... 'GyroscopeBiasNoise', 'MagnetometerBiasNoise'}); config.TunableParameters
ans = 1×10 string
"AccelerationNoise" "AccelerometerNoise" "AngularVelocityNoise" "GPSPositionNoise" "GPSVelocityNoise" "GyroscopeNoise" "MagnetometerNoise" "PositionNoise" "QuaternionNoise" "VelocityNoise"
Use the tuner noise function to obtain a set of initial sensor noises used in the filter.
measNoise = tunernoise('insfilterAsync')measNoise = struct with fields:
AccelerometerNoise: 1
GyroscopeNoise: 1
MagnetometerNoise: 1
GPSPositionNoise: 1
GPSVelocityNoise: 1
Tune the filter and obtain the tuned parameters.
tunedParams = tune(filter,measNoise,sensorData,groundTruth,config);
Display the save parameters using the saved file.
fileObject = matfile('myfile.mat');
fileObject.paramsans = struct with fields:
AccelerationNoise: [88.8995 88.8995 88.8995]
AccelerometerBiasNoise: [1.0000e-07 1.0000e-07 1.0000e-07]
AccelerometerNoise: 0.7942
AngularVelocityNoise: [0.0089 0.0089 0.0089]
GPSPositionNoise: 1.1664
GPSVelocityNoise: 0.5210
GeomagneticVectorNoise: [1.0000e-07 1.0000e-07 1.0000e-07]
GyroscopeBiasNoise: [1.0000e-07 1.0000e-07 1.0000e-07]
GyroscopeNoise: 0.5210
MagnetometerBiasNoise: [1.0000e-07 1.0000e-07 1.0000e-07]
MagnetometerNoise: 1.0128
PositionNoise: [5.2100e-07 5.2100e-07 5.2100e-07]
QuaternionNoise: [1.3239e-06 1.3239e-06 1.3239e-06 1.3239e-06]
ReferenceLocation: [0 0 0]
State: [28×1 double]
StateCovariance: [28×28 double]
VelocityNoise: [6.3678e-07 6.3678e-07 6.3678e-07]
The output function
function stop = myOutputFcn(params, ~) save('myfile.mat','params'); % overwrite the file with latest stop = false; end
Version History
Introduced in R2020b
See Also
insfilterAsync | insfilterNonholonomic | insfilterMARG | insfilterErrorState | ahrsfilter | ahrs10filter | imufilter