rcsdisc
Radar cross section of flat circular plate
Description
rcspat = rcsdisc(r,c,fc)r. The radar cross section is a function of signal frequency,
fc, and signal propagation speed, c. The plate
is assumed to lie on the xy-plane. The center of the plate is located at
the origin of the local coordinate system.
Examples
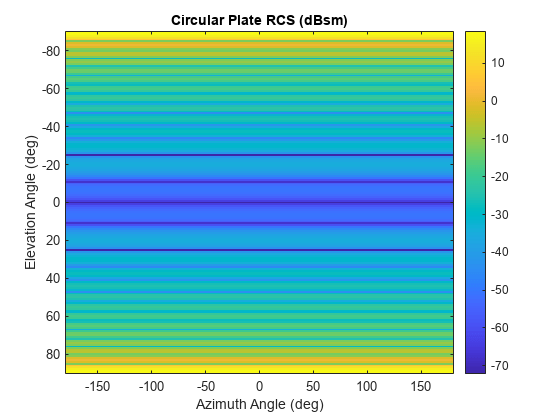
Display the radar cross section (RCS) pattern of a circular plate as a function of azimuth and elevation. The plate radius is 22.5 cm. The operating frequency is 4.5 GHz.
Specify the plate geometry and signal parameters.
c = physconst('Lightspeed');
fc = 4.5e9;
platerad = 0.225;Compute the RCS for all directions using the default direction values.
[rcspat,azresp,elresp] = rcsdisc(platerad,c,fc); imagesc(azresp,elresp,pow2db(rcspat)) colorbar xlabel('Azimuth Angle (deg)') ylabel('Elevation Angle (deg)') title('Circular Plate RCS (dBsm)')
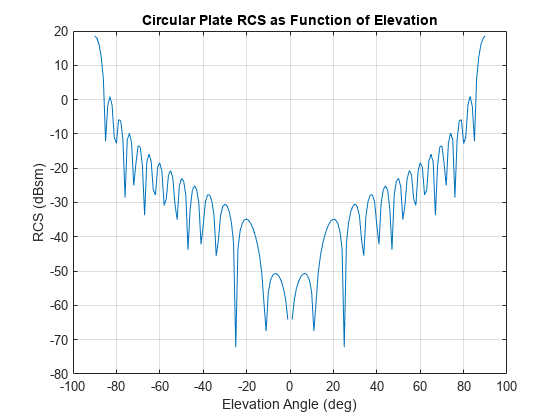
Plot the radar cross section (RCS) pattern of a circular plate as a function of elevation angle for a fixed azimuth angle of 5. The plate radius is 22.5 cm. The operating frequency is 4.5 GHz.
Define the plate radius and signal parameters.
c = physconst('Lightspeed');
fc = 4.5e9;
platerad = 0.225;Compute the RCS as a function of elevation.
az = 5; el = -90:90; [rcspat,azresp,elresp] = rcsdisc(platerad,c,fc,az,el); plot(elresp,pow2db(rcspat)) xlabel('Elevation Angle (deg)') ylabel('RCS (dBsm)') title('Circular Plate RCS as Function of Elevation') grid on
Plot the radar cross section (RCS) pattern of a circular plate as a function of frequency for a single azimuth and elevation. The plate radius 22.5 cm.
Define the plate radius and signal parameters.
c = physconst('Lightspeed');
platerad = 0.225;Compute the RCS over a range of frequencies for a single direction.
az = 5.0; el = 20.0; fc = (100:10:4000)*1e6; [rcspat,azpat,elpat] = rcsdisc(platerad,c,fc,az,el); disp([azpat,elpat])
5 20
plot(fc/1e6,pow2db(squeeze(rcspat))) xlabel('Frequency (MHz)') ylabel('RCS (dBsm)') title('Circular Plate RCS as Function of Frequency') grid on

Input Arguments
Output Arguments
More About
This section describes the convention used to define azimuth and elevation angles.
The azimuth angle of a vector is the angle between the x-axis and its orthogonal projection onto the xy-plane. The angle is positive when going from the x-axis toward the y-axis. Azimuth angles lie between –180° and 180° degrees, inclusive. The elevation angle is the angle between the vector and its orthogonal projection onto the xy-plane. The angle is positive when going toward the positive z-axis from the xy-plane. Elevation angles lie between –90° and 90° degrees, inclusive.

References
[1] Mahafza, Bassem. Radar Systems Analysis and Design Using MATLAB, 2nd Ed. Boca Raton, FL: Chapman & Hall/CRC, 2005.
Extended Capabilities
Version History
Introduced in R2021a
See Also
rcscylinder | rcssphere | rcstruncone | phased.BackscatterRadarTarget | phased.RadarTarget