show
Description
The show object function shows one or more
configuration trajectories in a Deep-Learning-Based Covariant Hamiltonian Optimization for
Motion Planning (DLCHOMP) environment with obstacles. CHOMP is a gradient-descent-based
planner that plans and optimizes trajectories for smoothness and collision avoidance. For more
information about CHOMP, see the manipulatorCHOMP
or dlCHOMP
object.
show( visualizes the rigid body tree
in the home configuration of the rigid body tree and spherical obstacles. The function
overlays the spherical approximation of the rigid body tree on top of the rigid body tree
meshes.dlchomp)
show(___,Parent= plots
the DLCHOMP visualization on the specified axes, in addition to any combination of input
arguments from previous syntaxes.parentAx)
ax = show(___)
Examples
Download a pretrained dlCHOMP object for the KUKA LBR iiwa 7 robot.
dataZip = matlab.internal.examples.downloadSupportFile("rst/data/dlCHOMP/R2024a/","kukaIiwa7DLCHOMPTrained.zip"); dataFilePaths = unzip(dataZip);
Load the trainedDLCHOMP MAT file. The file contains the trained DLCHOMP optimizer, obstacles, and start and goal configurations.
load trainedDLCHOMP.matWarning: Cannot load an object of class 'dlCHOMPDatastore': Its class cannot be found.
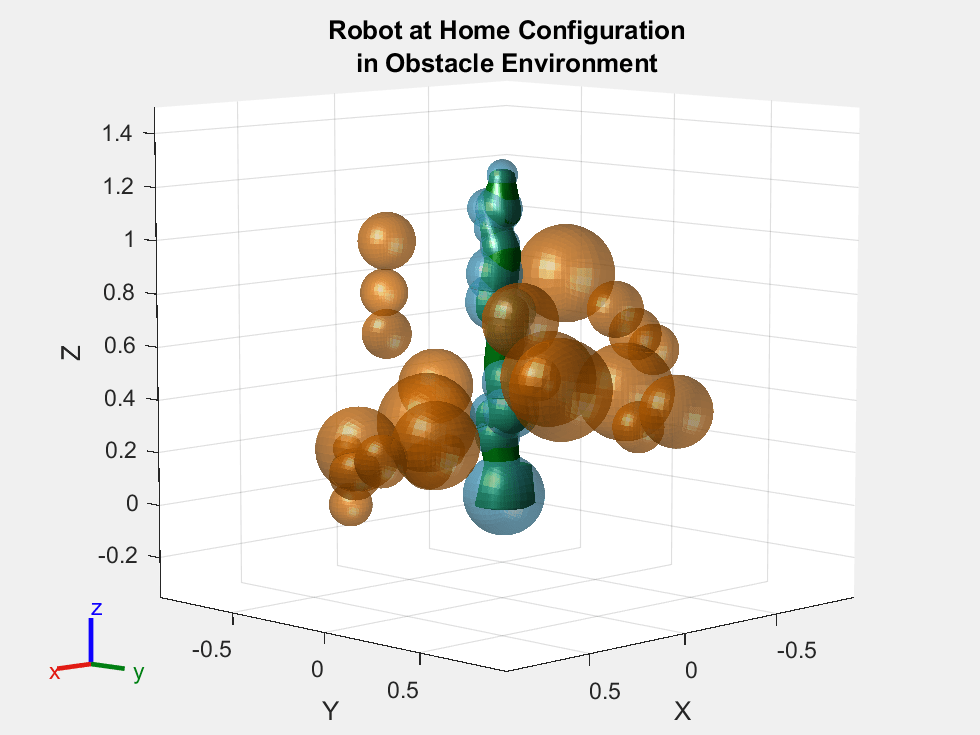
Add the obstacles to the dlCHOMP object and show the robot in the home configuration with the loaded obstacles.
trainedDLCHOMP.SphericalObstacles = unseenObstacles; show(trainedDLCHOMP); title(["Robot at Home Configuration","in Obstacle Environment"]) axis auto
Optimize trajectory between the start and goal configuration.
trainedDLCHOMP.RigidBodyTree.DataFormat = "column"trainedDLCHOMP =
dlCHOMP with properties:
RigidBodyTree: [1×1 rigidBodyTree]
RigidBodyTreeSpheres: [11×1 table]
SmoothnessOptions: [1×1 chompSmoothnessOptions]
SolverOptions: [1×1 chompSolverOptions]
CollisionOptions: [1×1 chompCollisionOptions]
SphericalObstacles: [4×24 double]
BPSEncoder: [1×1 bpsEncoder]
NumWaypoints: 40
Network: [1×1 dlnetwork]
NumInputs: [14 10000]
NumOutputs: 266
[wpts,tpts,solninfo] = optimize(trainedDLCHOMP,unseenStart,unseenGoal);
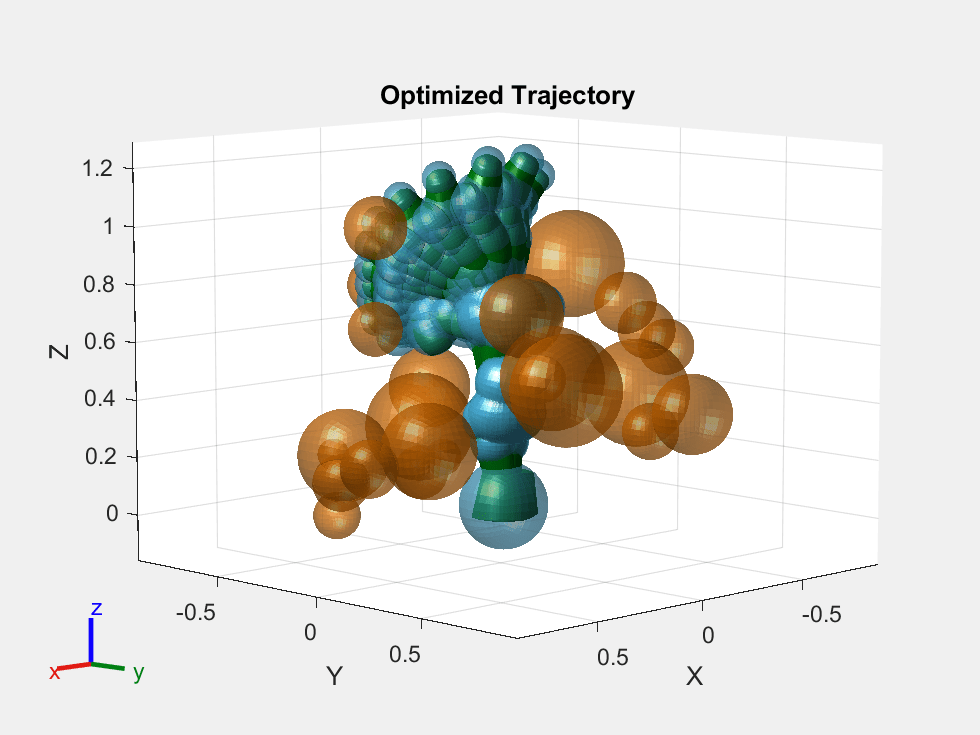
Visualize the trajectory.
figure a = show(trainedDLCHOMP,wpts); title("Optimized Trajectory") axis equal
Input Arguments
Output Arguments
Version History
Introduced in R2024a