dlCHOMP
Description
The dlCHOMP object uses Deep-Learning-Based Covariant
Hamiltonian Optimization for Motion Planning (DLCHOMP) for rigid body tree robot models.
dlCHOMP optimizes the deep learning network to predict trajectories
that are both smooth and avoid collisions.
For an example showing how to train dlCHOMP, see Train Deep-Learning-Based CHOMP Optimizer for Motion Planning.
To download pretrained dlCHOMP objects and their associated training
data, see Pretrained Optimizers.
To use CHOMP without deep learning, use the manipulatorCHOMP
object.
The dlCHOMP object requires Deep Learning Toolbox™.
Creation
Description
DLCHOMP = dlCHOMP(
creates a deep-learning CHOMP-based optimizer for a rigid body tree that encodes an
obstacle environment using the specified basis point set (BPS) encoder and guesses a
trajectory with the specified number of waypoints. The robotRBT,encoder,numWpts)robotRBT,
encoder, and numWpts arguments set the
RigidBodyTree, BPSEncoder, and
NumWaypoints properties, respectively.
DLCHOMP = dlCHOMP(___,
specifies properties using one or more name-value arguments in addition to the input
arguments from the previous syntax.Name=Value)
Properties
Object Functions
generateSamples | Generate data sets for training deep-learning-based CHOMP optimizer |
trainDLCHOMP | Train deep-learning-based CHOMP optimizer |
optimize | Optimize trajectory using deep-learning-based CHOMP |
resetCHOMPOptions | Reset option properties to last trained state |
show | Visualize deep-learning-based CHOMP trajectory of rigid body tree |
Examples
Download a pretrained dlCHOMP object for the KUKA LBR iiwa 7 robot.
dataZip = matlab.internal.examples.downloadSupportFile("rst/data/dlCHOMP/R2024a/","kukaIiwa7DLCHOMPTrained.zip"); dataFilePaths = unzip(dataZip);
Load the trainedDLCHOMP MAT file. The file contains the trained DLCHOMP optimizer, obstacles, and start and goal configurations.
load trainedDLCHOMP.matWarning: Cannot load an object of class 'dlCHOMPDatastore': Its class cannot be found.
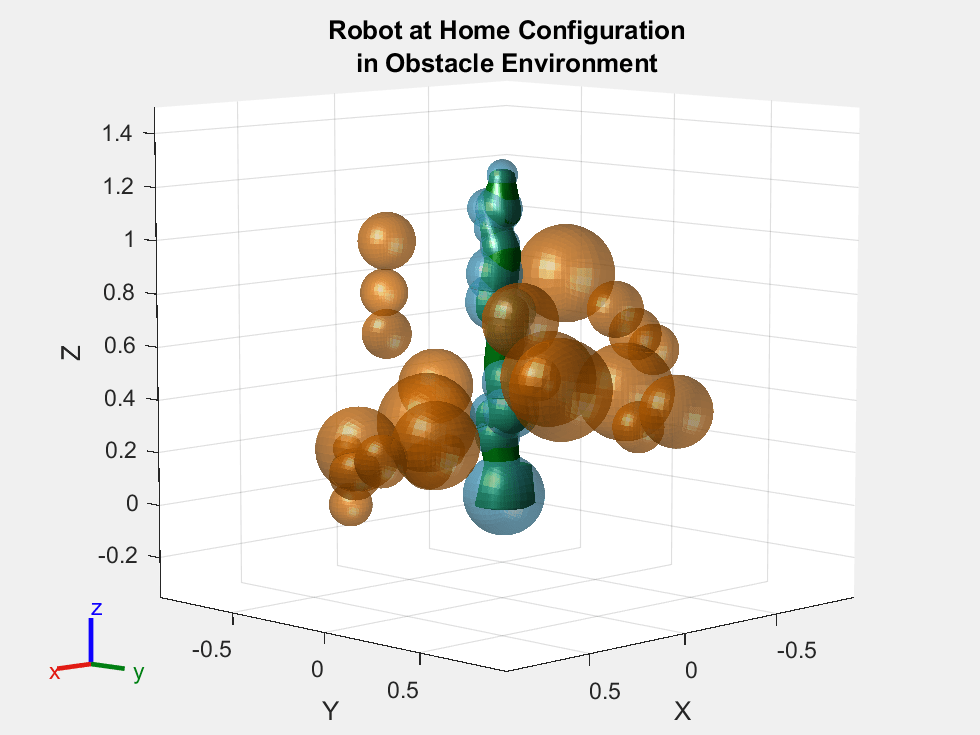
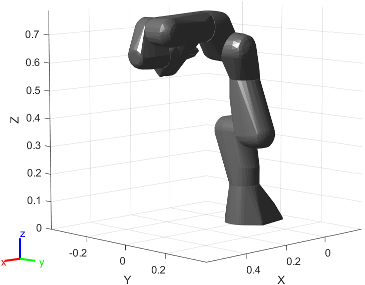
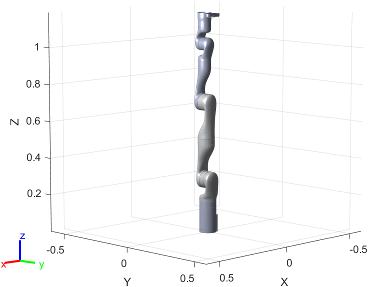
Add the obstacles to the dlCHOMP object and show the robot in the home configuration with the loaded obstacles.
trainedDLCHOMP.SphericalObstacles = unseenObstacles; show(trainedDLCHOMP); title(["Robot at Home Configuration","in Obstacle Environment"]) axis auto
Optimize trajectory between the start and goal configuration.
trainedDLCHOMP.RigidBodyTree.DataFormat = "column"trainedDLCHOMP =
dlCHOMP with properties:
RigidBodyTree: [1×1 rigidBodyTree]
RigidBodyTreeSpheres: [11×1 table]
SmoothnessOptions: [1×1 chompSmoothnessOptions]
SolverOptions: [1×1 chompSolverOptions]
CollisionOptions: [1×1 chompCollisionOptions]
SphericalObstacles: [4×24 double]
BPSEncoder: [1×1 bpsEncoder]
NumWaypoints: 40
Network: [1×1 dlnetwork]
NumInputs: [14 10000]
NumOutputs: 266
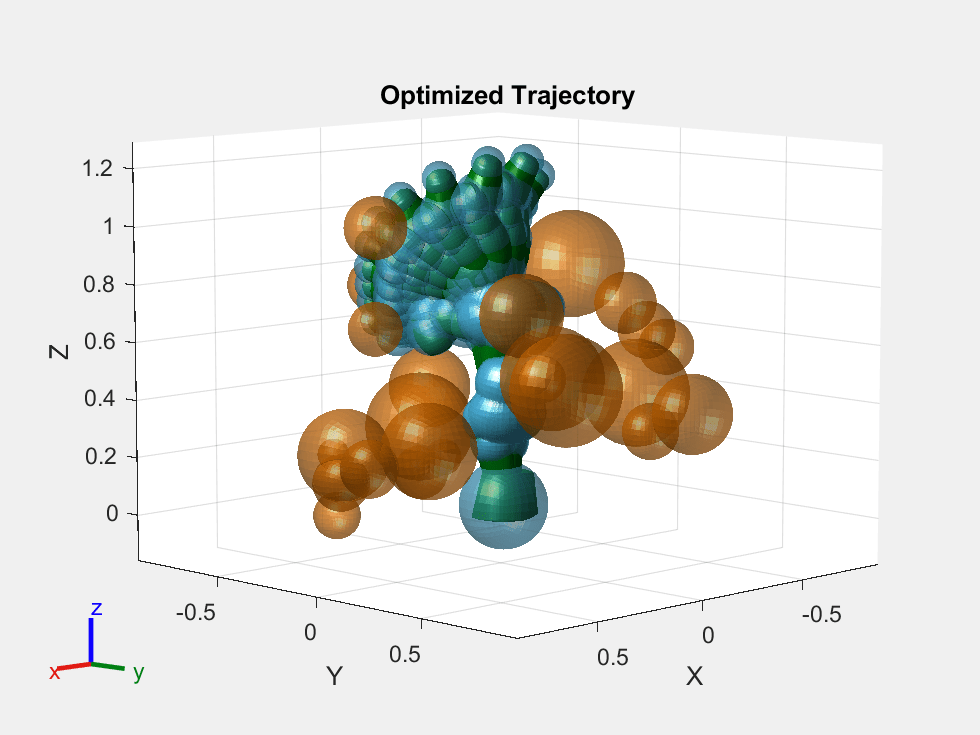
[wpts,tpts,solninfo] = optimize(trainedDLCHOMP,unseenStart,unseenGoal);
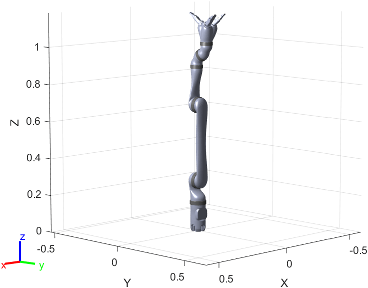
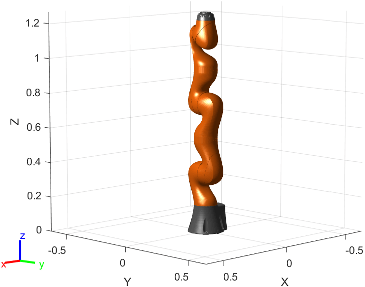
Visualize the trajectory.
figure a = show(trainedDLCHOMP,wpts); title("Optimized Trajectory") axis equal
More About
MathWorks® provides pretrained dlCHOMP objects for these robots and
their associated training data as downloadable ZIP files.
| Robot Model | Mesh Visualization | Download Links |
|---|---|---|
| ABB YuMi 2-armed robot |
| |
| FANUC LR Mate 200iB 6-axis robot |
| |
| FANUC M-16iB 6-axis robot |
| |
| Franka Emika Panda 7-axis robot |
| |
| KINOVA® Gen3 7-axis robot |
| |
| KINOVA JACO® 3-fingered 6 DOF robot with non-spherical wrist |
| |
| KUKA LBR iiwa 7 R800 7-axis robot |
| |
| Mecademic Meca500 R3 6-axis robot |
| |
| Techman TM5-700 6-axis robot with Camera |
| |
| Universal Robots UR5e 6-axis robot |
|


Tips
Guidance for Training DLCHOMP
Read each condition to determine which resource to use for DLCHOMP training or retraining guidance.
If you do not have any trained
dlCHOMPobjects, then see the Train Deep-Learning-Based CHOMP Optimizer for Motion Planning example. You can also use this example if you have a traineddlCHOMPobject that does not have the desired BPS encoding, robot model, or environment.If you have a trained
dlCHOMPobject that does not have the desired number of waypoints, but does have the desired BPS encoding, robot model, and environment, then see the Using Pretrained DLCHOMP Optimizer to Predict Higher Number of Waypoints example.If you have a trained
dlCHOMPobject that does not have the desired data options or CHOMP options, but does have the desired BPS encoding, robot model, environment, and number of waypoints, then see the Using Pretrained DLCHOMP Optimizer in Unseen Obstacle Environment example.
References
[1] Tenhumberg, Johannes, Darius Burschka, and Berthold Bäuml. “Speeding Up Optimization-Based Motion Planning through Deep Learning.” In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 7182–89. Kyoto, Japan: IEEE, 2022. https://doi.org/10.1109/IROS47612.2022.9981717.
[2] Ratliff, Nathan, Siddhartha Srinivasa, Matt Zucker, and Andrew Bagnell. “CHOMP: Gradient Optimization Techniques for Efficient Motion Planning.” In 2009 IEEE International Conference on Robotics and Automation, 489–94. Kobe, Japan: IEEE, 2009. https://doi.org/10.1109/ROBOT.2009.5152817.