showdetails
Show details of robot model
Syntax
Description
Examples
Add a rigid body and corresponding joint to a rigid body tree. Each rigidBody object contains a rigidBodyJoint object and must be added to the rigidBodyTree using addBody.
Create a rigid body tree.
rbtree = rigidBodyTree;
Create a rigid body with a unique name.
body1 = rigidBody('b1');Create a revolute joint. By default, the rigidBody object comes with a fixed joint. Replace the joint by assigning a new rigidBodyJoint object to the body1.Joint property.
jnt1 = rigidBodyJoint('jnt1','revolute'); body1.Joint = jnt1;
Add the rigid body to the tree. Specify the body name that you are attaching the rigid body to. Because this is the first body, use the base name of the tree.
basename = rbtree.BaseName; addBody(rbtree,body1,basename)
Use showdetails on the tree to confirm the rigid body and joint were added properly.
showdetails(rbtree)
-------------------- Robot: (1 bodies) Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 b1 jnt1 revolute base(0) --------------------
Make changes to an existing rigidBodyTree object. You can get replace joints, bodies and subtrees in the rigid body tree.
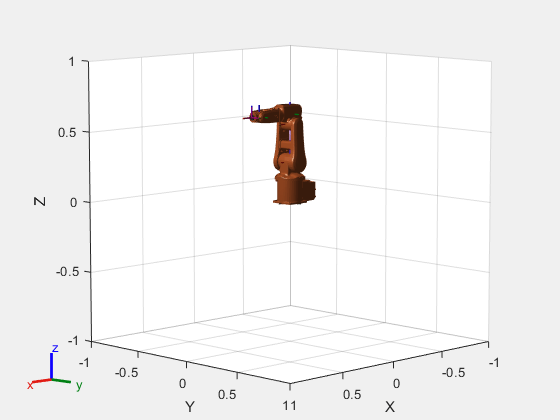
Load an ABB IRB-120T manipulator from the Robotics System Toolbox™ loadrobot. It is specified as a rigidBodyTree object.
manipulator = loadrobot("abbIrb120T");View the robot with show and read the details of the robot using showdetails.
show(manipulator);
showdetails(manipulator)
-------------------- Robot: (8 bodies) Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 base base_link-base fixed base_link(0) 2 link_1 joint_1 revolute base_link(0) link_2(3) 3 link_2 joint_2 revolute link_1(2) link_3(4) 4 link_3 joint_3 revolute link_2(3) link_4(5) 5 link_4 joint_4 revolute link_3(4) link_5(6) 6 link_5 joint_5 revolute link_4(5) link_6(7) 7 link_6 joint_6 revolute link_5(6) tool0(8) 8 tool0 joint6-tool0 fixed link_6(7) --------------------
Get a specific body to inspect the properties. The only child of the link_3 body is the link_4 body. You can copy a specific body as well.
body3 = getBody(manipulator,"link_3");
childBody = body3.Children{1}childBody =
rigidBody with properties:
Name: 'link_4'
Joint: [1×1 rigidBodyJoint]
Mass: 1.3280
CenterOfMass: [0.2247 1.5000e-04 4.1000e-04]
Inertia: [0.0028 0.0711 0.0723 1.3052e-05 -1.3878e-04 -6.6037e-05]
Parent: [1×1 rigidBody]
Children: {[1×1 rigidBody]}
Visuals: {'Mesh Filename link_4.stl'}
Collisions: {'Mesh Filename link_4.stl'}
FrameNames: {'link_4'}
ParentFrame: 'link_3'
body3Copy = copy(body3);
Replace the joint on the link_3 body. You must create a new Joint object and use replaceJoint to ensure the downstream body geometry is unaffected. Call setFixedTransform if necessary to define a transform between the bodies instead of with the default identity matrices.
newJoint = rigidBodyJoint("prismatic"); replaceJoint(manipulator,"link_3",newJoint); showdetails(manipulator)
-------------------- Robot: (8 bodies) Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 base base_link-base fixed base_link(0) 2 link_1 joint_1 revolute base_link(0) link_2(3) 3 link_2 joint_2 revolute link_1(2) link_3(4) 4 link_3 prismatic fixed link_2(3) link_4(5) 5 link_4 joint_4 revolute link_3(4) link_5(6) 6 link_5 joint_5 revolute link_4(5) link_6(7) 7 link_6 joint_6 revolute link_5(6) tool0(8) 8 tool0 joint6-tool0 fixed link_6(7) --------------------
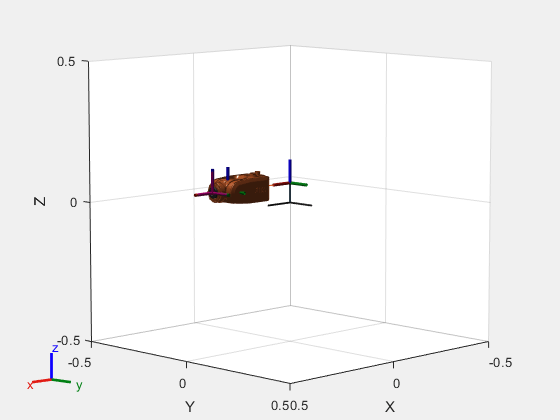
Remove an entire body and get the resulting subtree using removeBody. The removed body is included in the subtree.
subtree = removeBody(manipulator,"link_4")subtree =
rigidBodyTree with properties:
NumBodies: 4
Bodies: {[1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody]}
Base: [1×1 rigidBody]
BodyNames: {'link_4' 'link_5' 'link_6' 'tool0'}
BaseName: 'link_3'
Gravity: [0 0 0]
DataFormat: 'struct'
FrameNames: {'link_3' 'link_4' 'link_5' 'link_6' 'tool0'}
show(subtree);
Remove the modified link_3 body. Add the original copied link_3 body to the link_2 body, followed by the returned subtree. The robot model remains the same. See a detailed comparison through showdetails.
removeBody(manipulator,"link_3"); addBody(manipulator,body3Copy,"link_2") addSubtree(manipulator,"link_3",subtree) showdetails(manipulator)
-------------------- Robot: (8 bodies) Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 base base_link-base fixed base_link(0) 2 link_1 joint_1 revolute base_link(0) link_2(3) 3 link_2 joint_2 revolute link_1(2) link_3(4) 4 link_3 joint_3 revolute link_2(3) link_4(5) 5 link_4 joint_4 revolute link_3(4) link_5(6) 6 link_5 joint_5 revolute link_4(5) link_6(7) 7 link_6 joint_6 revolute link_5(6) tool0(8) 8 tool0 joint6-tool0 fixed link_6(7) --------------------
Use the Denavit-Hartenberg (DH) parameters of the Puma560® robot to build a robot. Each rigid body is added one at a time, with the child-to-parent transform specified by the joint object.
The DH parameters define the geometry of the robot with relation to how each rigid body is attached to its parent. For convenience, setup the parameters for the Puma560 robot in a matrix [1]. The Puma robot is a serial chain manipulator. The DH parameters are relative to the previous row in the matrix, corresponding to the previous joint attachment.
dhparams = [0 pi/2 0 0;
0.4318 0 0 0
0.0203 -pi/2 0.15005 0;
0 pi/2 0.4318 0;
0 -pi/2 0 0;
0 0 0 0];Create a rigid body tree object to build the robot.
robot = rigidBodyTree;
Create the first rigid body and add it to the robot. To add a rigid body:
Create a
rigidBodyobject and give it a unique name.Create a
rigidBodyJointobject and give it a unique name.Use
setFixedTransformto specify the body-to-body transformation using DH parameters. The last element of the DH parameters,theta, is ignored because the angle is dependent on the joint position.Call
addBodyto attach the first body joint to the base frame of the robot.
body1 = rigidBody('body1'); jnt1 = rigidBodyJoint('jnt1','revolute'); setFixedTransform(jnt1,dhparams(1,:),'dh'); body1.Joint = jnt1; addBody(robot,body1,'base')
Create and add other rigid bodies to the robot. Specify the previous body name when calling addBody to attach it. Each fixed transform is relative to the previous joint coordinate frame.
body2 = rigidBody('body2'); jnt2 = rigidBodyJoint('jnt2','revolute'); body3 = rigidBody('body3'); jnt3 = rigidBodyJoint('jnt3','revolute'); body4 = rigidBody('body4'); jnt4 = rigidBodyJoint('jnt4','revolute'); body5 = rigidBody('body5'); jnt5 = rigidBodyJoint('jnt5','revolute'); body6 = rigidBody('body6'); jnt6 = rigidBodyJoint('jnt6','revolute'); setFixedTransform(jnt2,dhparams(2,:),'dh'); setFixedTransform(jnt3,dhparams(3,:),'dh'); setFixedTransform(jnt4,dhparams(4,:),'dh'); setFixedTransform(jnt5,dhparams(5,:),'dh'); setFixedTransform(jnt6,dhparams(6,:),'dh'); body2.Joint = jnt2; body3.Joint = jnt3; body4.Joint = jnt4; body5.Joint = jnt5; body6.Joint = jnt6; addBody(robot,body2,'body1') addBody(robot,body3,'body2') addBody(robot,body4,'body3') addBody(robot,body5,'body4') addBody(robot,body6,'body5')
Verify that your robot was built properly by using the showdetails or show function. showdetails lists all the bodies in the MATLAB® command window. show displays the robot with a given configuration (home by default). Calls to axis modify the axis limits and hide the axis labels.
showdetails(robot)
-------------------- Robot: (6 bodies) Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 body1 jnt1 revolute base(0) body2(2) 2 body2 jnt2 revolute body1(1) body3(3) 3 body3 jnt3 revolute body2(2) body4(4) 4 body4 jnt4 revolute body3(3) body5(5) 5 body5 jnt5 revolute body4(4) body6(6) 6 body6 jnt6 revolute body5(5) --------------------
show(robot);
axis([-0.5,0.5,-0.5,0.5,-0.5,0.5])
axis off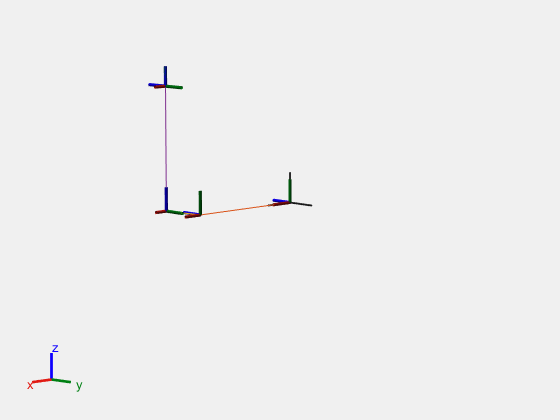
[1] Corke, P. I., and B. Armstrong-Helouvry. “A Search for Consensus among Model Parameters Reported for the PUMA 560 Robot.” Proceedings of the 1994 IEEE International Conference on Robotics and Automation, IEEE Computer. Soc. Press, 1994, pp. 1608–13. DOI.org (Crossref), doi:10.1109/ROBOT.1994.351360.
Input Arguments
Version History
Introduced in R2016b