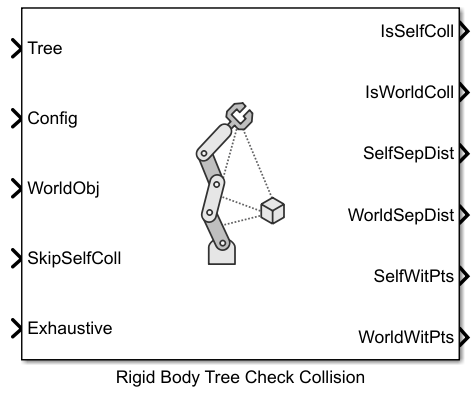
Rigid Body Tree Check Collision
Libraries:
Robotics System Toolbox /
Collision Detection
Description
The Rigid Body Tree Check Collision block checks if the specified rigid body tree robot model is in collision with itself or a specified set of collision objects in the world.
Examples
Use the loadrobot function to load a robot model from the Robot Library and set up the collision environment.
robot = loadrobot("abbIrb120",DataFormat="row"); rad = 0.08; len = 0.75; pose1 = trvec2tform([0.4 -0.35 0.3]); pose2 = trvec2tform([0 0.3 0.5]); cylinder = collisionCylinder(rad,len,Pose=pose1); sphere = collisionSphere(rad,Pose=pose2);
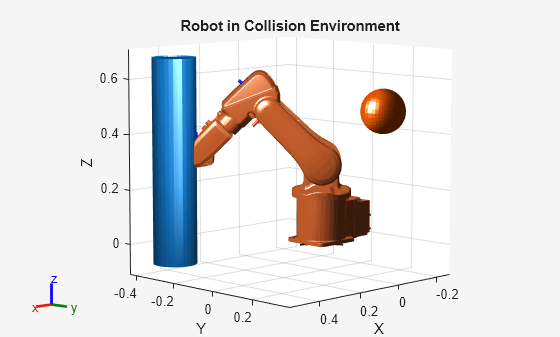
Show the robot with the collision environment. In this case, you can see the robot collides with the cylinder.
show(robot,[-pi/4 pi/4 0 0 -pi/4 0]); hold on showCollisionArray({cylinder,sphere}); title("Robot in Collision Environment") hold on
open_system("RBTCheckCollisionModel");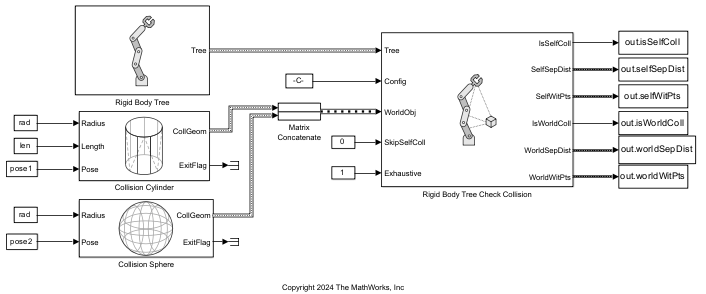
out = sim("RBTCheckCollisionModel");### Building simulation target for model: 'RBTCheckCollisionModel'.
/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/bin/mex -R2018a -c -DMATLAB_MEX_FILE -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/simulink/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/rtw/c/src" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cprj" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cgxe/RBTCheckCollisionModel/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics/collfcncodegen" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src/ccd" CFLAGS="\$CFLAGS -w -Dccd_EXPORTS" RBTCheckCollisionModel_cgxe.c
Building with 'gcc'.
MEX completed successfully.
/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/bin/mex -R2018a -c -DMATLAB_MEX_FILE -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/simulink/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/rtw/c/src" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cprj" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cgxe/RBTCheckCollisionModel/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics/collfcncodegen" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src/ccd" CFLAGS="\$CFLAGS -w -Dccd_EXPORTS" RBTCheckCollisionModel_cgxe_registry.c
Building with 'gcc'.
MEX completed successfully.
/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/bin/mex -R2018a -c -DMATLAB_MEX_FILE -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/simulink/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/rtw/c/src" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cprj" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cgxe/RBTCheckCollisionModel/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics/collfcncodegen" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src/ccd" CFLAGS="\$CFLAGS -w -Dccd_EXPORTS" m_ZXHy3KQMhws9TAt8f8GUBH.c
Building with 'gcc'.
MEX completed successfully.
/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/bin/mex -R2018a -c -DMATLAB_MEX_FILE -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/simulink/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/rtw/c/src" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cprj" -I"/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cgxe/RBTCheckCollisionModel/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics/collfcncodegen" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src/ccd" CFLAGS="\$CFLAGS -w -Dccd_EXPORTS" m_pVzB5BIgzpfL1QM94jYFR.c
Building with 'gcc'.
/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cgxe/RBTCheckCollisionModel/src/m_pVzB5BIgzpfL1QM94jYFR.c: In function ‘CollisionGeometryBuildableFunctional_intersect’:
/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cgxe/RBTCheckCollisionModel/src/m_pVzB5BIgzpfL1QM94jYFR.c:4965:22: error: passing argument 16 of ‘fromMLToCollStruct’ from incompatible pointer type [-Wincompatible-pointer-types]
4965 | &geom1struct.m_Vertices, &geom1struct.m_NumVertices,
| ^~~~~~~~~~~~~~~~~~~~~~~
| |
| const real64_T ** {aka const double **}
/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cgxe/RBTCheckCollisionModel/src/m_pVzB5BIgzpfL1QM94jYFR.c:1485:43: note: expected ‘real64_T **’ {aka ‘double **’} but argument is of type ‘const real64_T **’ {aka ‘const double **’}
1485 | real_T *geomstruct_m_Height, real64_T* *geomstruct_m_Vertices, uint32_T
| ~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~
/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cgxe/RBTCheckCollisionModel/src/m_pVzB5BIgzpfL1QM94jYFR.c:4972:22: error: passing argument 16 of ‘fromMLToCollStruct’ from incompatible pointer type [-Wincompatible-pointer-types]
4972 | &geom2struct.m_Vertices, &geom2struct.m_NumVertices,
| ^~~~~~~~~~~~~~~~~~~~~~~
| |
| const real64_T ** {aka const double **}
/tmp/Bdoc26a_3233028_1679788/tpe812315a/robotics-ex92028207/slprj/_cgxe/RBTCheckCollisionModel/src/m_pVzB5BIgzpfL1QM94jYFR.c:1485:43: note: expected ‘real64_T **’ {aka ‘double **’} but argument is of type ‘const real64_T **’ {aka ‘const double **’}
1485 | real_T *geomstruct_m_Height, real64_T* *geomstruct_m_Vertices, uint32_T
| ~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~
gmake: *** [m_pVzB5BIgzpfL1QM94jYFR.o] Error 255
### Build procedure for model: 'RBTCheckCollisionModel' aborted due to an error.
Self-Collision Data
Check the self-collision status for the robot at the first time step.
isSelfColliding = out.isSelfColl.Data(1)
Get the self-separation distance and self-witness points matrices for the first time step.
selfSepDist = out.selfSepDist.Data{1}
selfWitPts = out.selfWitPts.Data{1}Get the separation distance and corresponding witness points between link_1 and link_6. Use find and strcmp functions to get the indices of these bodies in the rigid body tree.
body1Idx = find(strcmp(robot.BodyNames,"link_1")); body2Idx = find(strcmp(robot.BodyNames,"link_6")); link1_link6_dist = selfSepDist(body1Idx,body2Idx) row = body1Idx*3-2; % body index * three dimensions (XYZ), -2 to get starting index of the submatrix col = body2Idx*2-1; % body index * two witness points, -1 to get starting index of the submatrix link1_link6_witpts = selfWitPts(row:row+2,col:col+1)
Plot a line between the witness points.
plot3(link1_link6_witpts(1,:),link1_link6_witpts(2,:),link1_link6_witpts(3,:),LineWidth=2);
World-Collision Data
Check the world-collision status for the robot at the first time step.
isWorldColliding = out.isWorldColl.Data(1)
Get the separation distances and witness points between the robot and the world objects for the first time step.
worldSepDist = out.worldSepDist.Data{1}
worldWitPts = out.worldWitPts.Data{1}Get the separation distance and corresponding witness points between link_4 and the sphere collision geometry.
bodyIdx = find(strcmp(robot.BodyNames,"link_3")); worldObjIdx = 2; link2_sphere_dist = worldSepDist(bodyIdx,worldObjIdx) row = bodyIdx*3-2; % body index * three dimensions (XYZ), -2 to get starting index of the submatrix col = worldObjIdx*2-1; % body index * two witness points, -1 to get starting index of the submatrix link2_sphere_witpts = worldWitPts(row:row+2,col:col+1)
Plot a line between the witness points.
plot3(link2_sphere_witpts(1,:),link2_sphere_witpts(2,:),link2_sphere_witpts(3,:),LineWidth=2);
This example shows how to visualize and understand the separation distance and witness point matrices from collision checking. The example uses model from the Check Robot for Collisions between Itself and World example.
open_system("RBTCheckCollisionModel"); out = sim("RBTCheckCollisionModel");
### Building simulation target for model: 'RBTCheckCollisionModel'.
/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/bin/mex -R2018a -c -DMATLAB_MEX_FILE -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/simulink/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/rtw/c/src" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cprj" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cgxe/RBTCheckCollisionModel/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics/collfcncodegen" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src/ccd" CFLAGS="\$CFLAGS -w -Dccd_EXPORTS" RBTCheckCollisionModel_cgxe.c
Building with 'gcc'.
MEX completed successfully.
/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/bin/mex -R2018a -c -DMATLAB_MEX_FILE -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/simulink/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/rtw/c/src" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cprj" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cgxe/RBTCheckCollisionModel/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics/collfcncodegen" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src/ccd" CFLAGS="\$CFLAGS -w -Dccd_EXPORTS" RBTCheckCollisionModel_cgxe_registry.c
Building with 'gcc'.
MEX completed successfully.
/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/bin/mex -R2018a -c -DMATLAB_MEX_FILE -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/simulink/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/rtw/c/src" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cprj" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cgxe/RBTCheckCollisionModel/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics/collfcncodegen" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src/ccd" CFLAGS="\$CFLAGS -w -Dccd_EXPORTS" m_ZXHy3KQMhws9TAt8f8GUBH.c
Building with 'gcc'.
MEX completed successfully.
/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/bin/mex -R2018a -c -DMATLAB_MEX_FILE -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/simulink/include" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/rtw/c/src" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cprj" -I"/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cgxe/RBTCheckCollisionModel/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/extern/include/shared_robotics/collfcncodegen" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src" -I"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/shared/robotics/externalDependency/libccd/src/ccd" CFLAGS="\$CFLAGS -w -Dccd_EXPORTS" m_pVzB5BIgzpfL1QM94jYFR.c
Building with 'gcc'.
/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cgxe/RBTCheckCollisionModel/src/m_pVzB5BIgzpfL1QM94jYFR.c: In function ‘CollisionGeometryBuildableFunctional_intersect’:
/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cgxe/RBTCheckCollisionModel/src/m_pVzB5BIgzpfL1QM94jYFR.c:4965:22: error: passing argument 16 of ‘fromMLToCollStruct’ from incompatible pointer type [-Wincompatible-pointer-types]
4965 | &geom1struct.m_Vertices, &geom1struct.m_NumVertices,
| ^~~~~~~~~~~~~~~~~~~~~~~
| |
| const real64_T ** {aka const double **}
/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cgxe/RBTCheckCollisionModel/src/m_pVzB5BIgzpfL1QM94jYFR.c:1485:43: note: expected ‘real64_T **’ {aka ‘double **’} but argument is of type ‘const real64_T **’ {aka ‘const double **’}
1485 | real_T *geomstruct_m_Height, real64_T* *geomstruct_m_Vertices, uint32_T
| ~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~
/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cgxe/RBTCheckCollisionModel/src/m_pVzB5BIgzpfL1QM94jYFR.c:4972:22: error: passing argument 16 of ‘fromMLToCollStruct’ from incompatible pointer type [-Wincompatible-pointer-types]
4972 | &geom2struct.m_Vertices, &geom2struct.m_NumVertices,
| ^~~~~~~~~~~~~~~~~~~~~~~
| |
| const real64_T ** {aka const double **}
/tmp/Bdoc26a_3233028_1709221/tp097f2c5e/robotics-ex60408521/slprj/_cgxe/RBTCheckCollisionModel/src/m_pVzB5BIgzpfL1QM94jYFR.c:1485:43: note: expected ‘real64_T **’ {aka ‘double **’} but argument is of type ‘const real64_T **’ {aka ‘const double **’}
1485 | real_T *geomstruct_m_Height, real64_T* *geomstruct_m_Vertices, uint32_T
| ~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~
gmake: *** [m_pVzB5BIgzpfL1QM94jYFR.o] Error 255
### Build procedure for model: 'RBTCheckCollisionModel' aborted due to an error.
Get the self-separation distance and self-witness points matrices for the first time step.
selfSepDist = out.selfSepDist.Data{1};
selfWitPts = out.selfWitPts.Data{1};For readability and illustrative purposes, convert the self-collision distance and self-witness points matrices to tables. You can use this table format to understand how the separation distance matrix is structured.
bodyNames = [robot.BodyNames robot.BaseName]; % Define this to use for table variables and rows selfDistTable = array2table(selfSepDist, ... % Convert to table for readability VariableNames=bodyNames, ... RowNames=bodyNames) selfWitPtsCell = exampleHelperWitPtsMatrixToCellArray(selfWitPts); selfWitPtsTable = array2table(selfWitPtsCell, ... % Convert to table for readability VariableNames=bodyNames, ... RowNames=bodyNames)
Get the separation distances and witness points between the robot and the world objects for the first time step.
worldSepDist = out.worldSepDist.Data{1};
worldWitPts = out.worldWitPts.Data{1};For readability and illustrative purposes, convert the world-collision distance and world-witness points matrices to tables. You can see the world object columns are in the order that you specify to the Rigid Body Tree Check Collision block.
worldDistTable = array2table(worldSepDist, ... % Convert to table for readability VariableNames=["cylinder","sphere"], ... RowNames=bodyNames) worldWitPtsCell = exampleHelperWitPtsMatrixToCellArray(out.worldWitPts.Data{1}); worldWitPtsTable = array2table(worldWitPtsCell, ... % Convert to table for readability VariableNames=["cylinder","sphere"], ... RowNames=bodyNames)
Ports
Input
Output
Parameters
Extended Capabilities
The Rigid Body Tree Check Collision block supports code generation with dynamic memory allocation disabled. For more information about disabling dynamic memory allocation, see Dynamic memory allocation in MATLAB functions (Simulink).
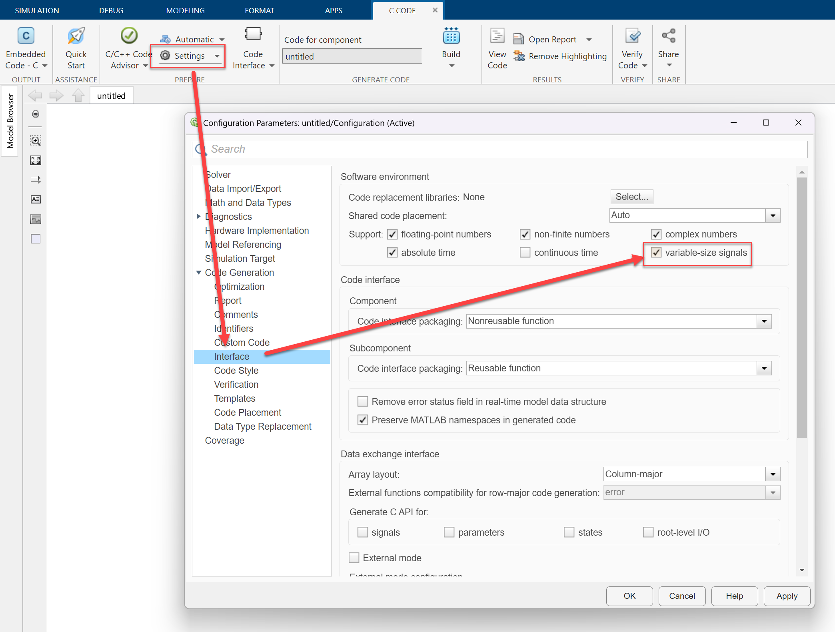
Note
To deploy code to real-time targets containing this block using Embedded Coder®, you must select the variable-size signals parameter in the Configuration Parameters dialog box.
Version History
Introduced in R2026a