Uncertain State Space
Simulate uncertain system in Simulink
Libraries:
Robust Control Toolbox
Description
The Uncertain State Space block lets you model parametric and dynamic uncertainty in
Simulink®. The block accepts uncertain state space (uss) models or any model that can be converted to uss, such as
umat, ureal, umargin, and
ultidyn objects.
Examples
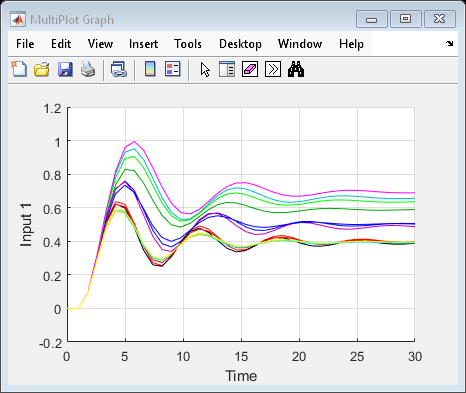
Simulate Uncertain Model at Sampled Parameter Values
Simulate an uncertain model in Simulink® using the Uncertain State Space block. You can sample uncertain parameters at specified values or generate random samples. The MultiPlot Graph block lets you visualize the responses of multiple samples on the same plot.
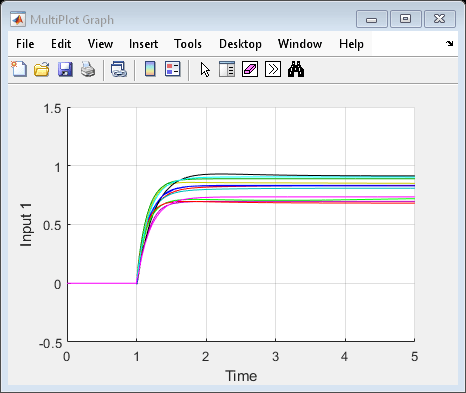
Vary Uncertain Values Across Multiple Uncertain Blocks
For models with a large number of uncertain variables or multiple Uncertain State Space blocks, you can vary multiple uncertainty values simultaneously.
Ports
Input
Output
Parameters
Version History
Introduced in R2009b