bilinear
用于模数滤波器转换的双线性变换方法
语法
说明
使用此函数将连续时间传递函数转换为等效的离散时间函数。
示例
为具有 6 dB 通带波纹的 10 阶切比雪夫 I 型滤波器设计原型。将原型转换为状态空间形式。
[z,p,k] = cheb1ap(10,6); [A,B,C,D] = zp2ss(z,p,k);
将原型变换为带通滤波器,使得等效数字滤波器在以速率 采样时其通带边缘位于 100 Hz 和 500 Hz。对于该变换,指定预修正的频带边缘 和 (以弧度/秒为单位)、中心频率 和带宽 。
fs = 2e3; f1 = 100; u1 = 2*fs*tan(f1*(2*pi/fs)/2); f2 = 500; u2 = 2*fs*tan(f2*(2*pi/fs)/2); [At,Bt,Ct,Dt] = lp2bp(A,B,C,D,sqrt(u1*u2),u2-u1);
使用 freqs 计算模拟滤波器的频率响应。绘制幅值响应和预修正的频带边缘。
[b,a] = ss2tf(At,Bt,Ct,Dt); [h,w] = freqs(b,a,2048); plot(w,mag2db(abs(h))) xline([u1 u2],"-",["Lower" "Upper"]+" passband edge", ... LabelVerticalAlignment="middle") ylim([-165 5]) xlabel("Angular frequency (rad/s)") ylabel("Magnitude (dB)") grid

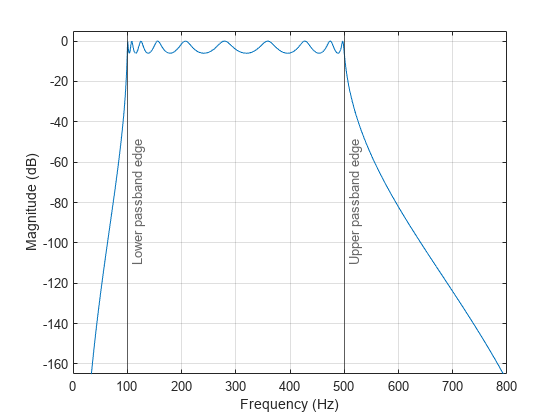
使用 bilinear 函数创建一个采样率为 的数字带通滤波器。
[Ad,Bd,Cd,Dd] = bilinear(At,Bt,Ct,Dt,fs);
将数字滤波器从状态空间形式转换为二阶节,并使用 freqz 计算频率响应。绘制幅值响应和通带边缘。
[hd,fd] = freqz(ss2sos(Ad,Bd,Cd,Dd),2048,fs); plot(fd,mag2db(abs(hd))) xline([f1 f2],"-",["Lower" "Upper"]+" passband edge", ... LabelVerticalAlignment="middle") ylim([-165 5]) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)") grid
设计一个 6 阶椭圆模拟低通滤波器,其通带波纹为 5 dB,阻带衰减为 90 dB,截止频率为 。
fc = 20;
[z,p,k] = ellip(6,5,90,2*pi*fc,"s");可视化模拟椭圆滤波器的幅值响应。显示截止频率。
[num,den] = zp2tf(z,p,k); [h,w] = freqs(num,den,1024); plot(w/(2*pi),mag2db(abs(h))) xline(fc,Color=[0.8500 0.3250 0.0980]) axis([0 100 -125 5]) grid legend(["Magnitude response" "Cutoff frequency"]) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)")
使用 bilinear 函数将模拟滤波器变换为离散时间 IIR 滤波器。指定采样率 和预修正匹配频率 。
fs = 200; fp = 20; [zd,pd,kd] = bilinear(z,p,k,fs,fp);
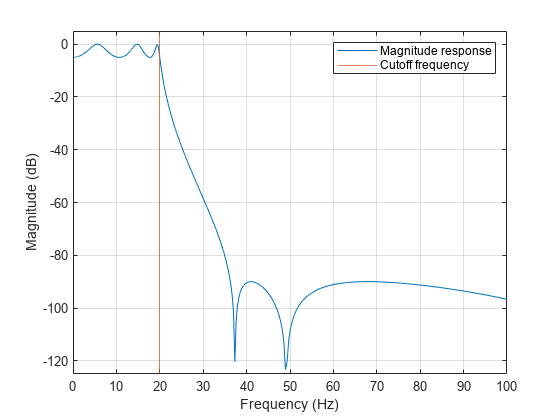
可视化离散时间滤波器的幅值响应。显示截止频率。
[hd,fd] = freqz(zp2sos(zd,pd,kd),[],fs); plot(fd,mag2db(abs(hd))) xline(fc,Color=[0.8500 0.3250 0.0980]) axis([0 100 -125 5]) grid legend(["Magnitude response" "Cutoff frequency"]) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)")

输入参数
输出参量
算法
参考
[1] Al-Saggaf, Ubaid M., and Gene F. Franklin. “Model Reduction via Balanced Realizations: An Extension and Frequency Weighting Techniques.” IEEE Transactions on Automatic Control 33, no. 7 (July 1988): 687–92. https://doi.org/10.1109/9.1280.
[2] Oppenheim, Alan V., and Ronald W. Schafer, with John R. Buck. Discrete-Time Signal Processing. Upper Saddle River, NJ: Prentice Hall, 1999.
[3] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. New York: John Wiley & Sons, 1987.
[4] Tustin, Arnold. “A Method of Analysing the Behaviour of Linear Systems in Terms of Time Series.” Journal of the Institution of Electrical Engineers - Part IIA: Automatic Regulators and Servo Mechanisms 94, no. 1 (May 1947): 130–42. https://doi.org/10.1049/ji-2a.1947.0020.
扩展功能
版本历史记录
在 R2006a 之前推出