impinvar
用于模数滤波器转换的冲激不变性方法
说明
示例
使用冲激不变性将一个六阶模拟巴特沃斯低通滤波器转换为数字滤波器。指定采样率为 10 Hz,截止频率为 2 Hz。显示滤波器的频率响应。
f = 2;
fs = 10;
[b,a] = butter(6,2*pi*f,'s');
[bz,az] = impinvar(b,a,fs);
freqz(bz,az,1024,fs)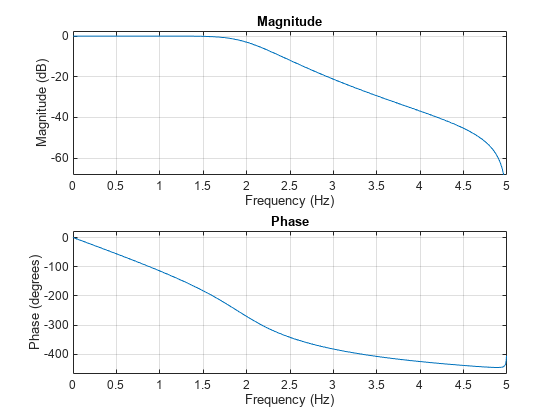
使用冲激不变性将一个三阶模拟椭圆滤波器转换为数字滤波器。指定采样率为 Hz、通带边缘频率为 2.5 Hz、通带波纹为 1 dB 和阻带衰减为 60 dB。显示数字滤波器的冲激响应。
fs = 10;
[b,a] = ellip(3,1,60,2*pi*2.5,'s');
[bz,az] = impinvar(b,a,fs);
impz(bz,az,[],fs)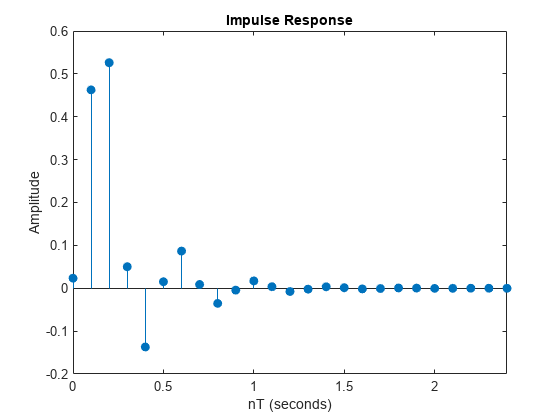
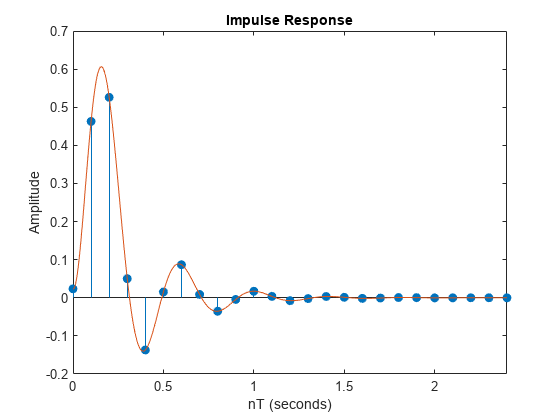
通过求传递函数的残差 和极点 并使用下式显式执行拉普拉斯逆变换,推断模拟滤波器的冲激响应:
叠加模拟滤波器的冲激响应。冲激不变性向数字滤波器引入 的增益。将模拟冲激响应乘以此增益以进行有意义的比较。
[r,p] = residue(b,a); t = linspace(0,4,1000); h = real(r.'*exp(p.*t)/fs); hold on plot(t,h) hold off
输入参数
输出参量
算法
impinvar 执行参考文献 [2] 中讨论的模数传递函数转换的冲激不变性方法:
它找到由
b和a表示的系统的部分分式展开式。它将极点
p替换为极点exp(p/fs)。它根据步骤 1 中的残差和步骤 2 中的极点求出系统的传递函数系数。
参考
[1] Antoniou, Andreas. Digital Filters. New York: McGraw-Hill, Inc., 1993.
[2] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. New York: John Wiley & Sons, 1987.
版本历史记录
在 R2006a 之前推出