什么是 S-Function
S-Function 或系统函数能够极大地扩充 Simulink® 环境的功能。S-Function 是以 MATLAB®、C、C++ 或 Fortran® 语言编写的 Simulink 模块的计算机语言描述。S-Function 使用一种称为 S-Function API 的特殊调用语法,使您能够与 Simulink 引擎进行交互。这种交互与该引擎和内置 Simulink 模块之间发生的交互非常相似。
对于用 MATLAB 编写的模块,请使用 2 级 MATLAB S-Function。要在 Simulink 模型中实现 2 级 MATLAB S-Function,请使用 Level-2 MATLAB S-Function 模块。有关详细信息,请参阅编写 2 级 MATLAB S-Function。
对于用 C、C++ 或 Fortran 编写的模块,请使用 C MEX S-Function。要在 Simulink 模型中实现 C MEX S-Function,请使用
mex实用工具和 S-Function 模块编译 S-Function。在编译 S-Function 并使用 S-Function 模块实现它后,您可以使用封装来自定义用户界面(请参阅创建模块封装)。
与其他 MEX 文件一样,S-Function 是动态链接的子例程,MATLAB 执行引擎可以自动加载和执行它们。有关详细信息,请参阅创建并实现基本的 C MEX S-Function。
您还可以使用 S-Function Builder 模块来集成新的或现有 C 或 C++ 代码,并根据您提供的设定创建 C MEX S-Function。
如果您有 Simulink Coder™,可以在模型中使用 S-Function 并生成代码。您还可以通过编写目标语言编译器 (TLC) 文件来自定义为 S-Function 生成的代码。有关详细信息,请参阅 S-Function 和代码生成 (Simulink Coder)。
S-Function 的工作原理
S-Function 定义模块在仿真的不同部分(例如初始化、更新、求导、输出和终止)如何工作。在仿真的每一步,仿真引擎都会调用一个方法来完成特定任务。学习 S-Function 基础知识需要基本掌握模块输入、状态和输出之间的数学关系。要了解 S-Function 的工作原理,首先您需要了解 Simulink 如何仿真模型的数学原理,即仿真的各个阶段。有关更多详细信息,请参阅动态系统的仿真阶段。
Simulink 模块的数学原理
Simulink 模块由一组输入、一组状态、一组参数和一组输出组成,其中输出是仿真时间、输入、参数和状态的函数。

以下方程表达了输入、输出、参数、状态和仿真时间之间的数学关系。
其中
仿真阶段
Simulink 模型的执行分阶段进行。在初始化阶段,Simulink 引擎将库模块合并到模型中,传播信号宽度、数据类型和采样时间,计算模块参数,确定模块执行顺序,并分配内存。然后,引擎进入仿真循环,每经历一次循环就称为一个仿真步。在每个仿真步,引擎按照在初始化过程中确定的顺序执行模型中的每个模块。对于每个模块,引擎调用相应函数来计算当前采样时间的模块状态、导数和输出。然后,整个仿真循环继续执行,直到仿真完成。
模型初始化 - 模型为仿真做准备。在此阶段,计算模块参数,确定模块执行顺序,并为每个运算分配内存。在此阶段后,模块经历一个仿真循环。
连续状态和时间的更新 - 仅当模型具有连续状态时才发生。您可以修改子时间步方法(如 mdlOutputs、mdlDerivatives 和 mdlZeroCrossing)来计算输出。
S-Function 回调方法
S-Function 由一组 S-Function 回调方法组成,这些方法执行每个仿真阶段所需的任务。在模型仿真期间的每个仿真阶段,Simulink 引擎都会为模型中的每个 S-Function 模块调用适当的方法。S-Function 回调方法执行的任务包括:
编译 - 在此阶段,Simulink 引擎初始化 S-Function。任务包括:
将库模块合并到模型中,并传播信号宽度、数据类型和采样时间
设置输入和输出端口的数目和维度
计算模块参数,并确定模块执行顺序
分配内存和存储区域
计算输出 - 在此状态下,计算输出,直到所有模块输出端口都对当前时间步有效,即所有输出值都在某个误差界限内。
更新离散状态 - 在此调用中,模块执行那些在每个时间步执行一次的活动,如更新离散状态。
初始化和终止方法 - 这些可选方法只执行一次 S-Function 所需的初始化和终止活动。初始化活动可能包括设置用户数据,或在 S-Function 中初始化状态向量。终止方法执行任何操作,例如当仿真终止或从模型中删除 S-Function 模块时释放所需的内存。
积分 - 这适用于具有连续状态和/或非采样过零点的模型。如果您的 S-Function 具有连续状态,引擎会在子时间步上调用 S-Function 的输出和导数部分。这是为了让求解器可以计算 S-Function 的状态。如果 S-Function 具有非采样过零点,引擎还会在子时间步上调用 S-Function 的输出和过零点部分,以便能够定位过零点。
要了解关于仿真的术语,尤其关于 S-Function 的术语,请参阅 S-Function Concepts。
在模型中使用 S-Function
要将 C MEX S-Function 合并到模型中,请从 Simulink 库浏览器中拖动一个 S-function 模块。同样,要将 Level-2 MATLAB S-function 合并到模型中,请将 Level-2 MATLAB S-function 模块拖到模型中。
打开模块参数对话框,在 S-Function 名称字段指定 S-Function 名称,以便为 S-function 模块提供功能。例如,键入
timestwo并点击应用以添加一个将传入信号乘以 2 的 C MEX S-Function。
注意
如果 MATLAB 路径中包括同名的 C MEX 文件和 MATLAB 文件,则 S-Function 模块在引用该名称时将使用 C MEX 文件。
向 S-Function 传递参数
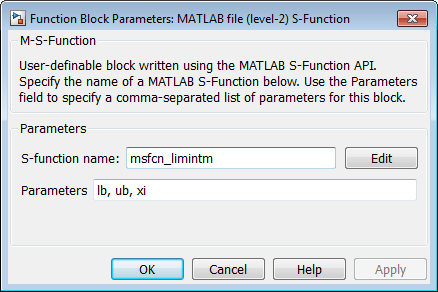
在 S-function 模块和 Level-2 MATLAB S-Function 的模块参数窗口中,都可以指定要传递给对应 S-Function 的参数值。要使用这些字段,您必须知道 S-Function 需要的参数以及函数需要这些参数的顺序。(如果您不知道,请咨询 S-Function 的作者、参考相关文档或源代码。)按照 S-Function 要求的顺序输入各参数,以逗号分隔。参数值可以是常量、在 MATLAB 或模型工作区中定义的变量名称,或是 MATLAB 表达式。
以下示例说明如何使用参数字段为 2 级 MATLAB S-Function 输入用户定义的参数。
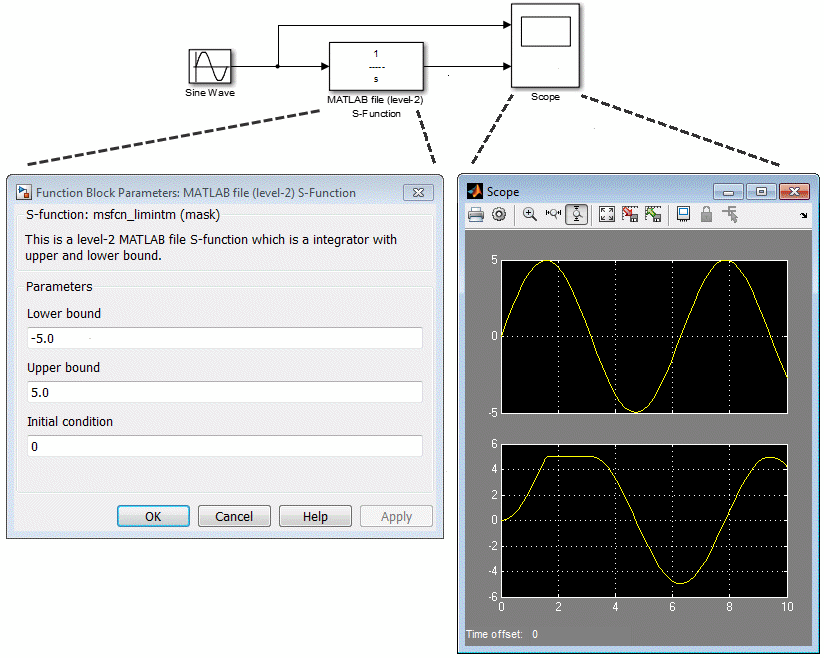
此示例中的模型 msfcndemo_limintm 包含示例 S-Function msfcn_limintm.m。
msfcn_limintm.m S-Function 接受三个参数:下界、上界和初始条件。如果输入信号的时间积分在下限和上限之间,则 S-Function 输出时间积分;如果时间积分小于下界,则输出下界;如果时间积分大于上界,则输出上界。示例中的对话框指定下界和上界以及初始条件,它们分别为 -5.0、5.0 和 0。示波器显示当输入是振幅为 5 的正弦波时的结果输出。
有关如何在 S-Function 中访问用户指定参数的信息,请参阅处理 S-Function 参数和Handle Errors in S-Functions。
您可以使用封装功能为 S-Function 模块创建自定义对话框和图标。通过封装对话框,可以更轻松地为 S-Function 指定其他参数。有关封装的讨论,请参阅创建模块封装。
何时使用 S-Function
您可以将 S-Function 用于各种应用,包括:
创建新的通用模块
添加表示硬件设备驱动的模块
将现有 C 代码合并到仿真中(请参阅Integrate C Functions Using Legacy Code Tool)
将系统描述为一组数学方程
使用图形动画(请参阅倒立摆示例,用动画演示倒立摆)
S-Function 最常见的用途是创建自定义 Simulink 模块(请参阅模块创建基础知识)。当使用 S-Function 创建通用模块时,可以在一个模型中多次使用它,并根据模块的每个实例更改参数。
另请参阅
Level-2 MATLAB S-Function | S-Function Builder | S-Function | MATLAB Function