用动画演示倒立摆
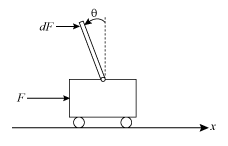
此示例说明如何使用 Simulink® 对倒立摆系统建模进行动画演示。倒立摆的质心在枢轴点上方。为了稳定地保持此位置,当钟摆开始下落时,系统执行控制逻辑以将枢轴点移至质心下方。倒立摆是用于测试控制策略的经典动力学问题。
系统
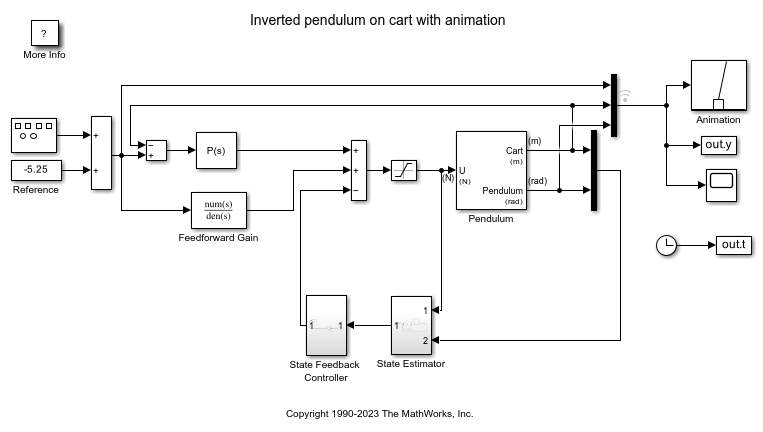
在此示例中,系统由装载在移动小车上的一个倒立摆组成。该模型将运动限制在垂直平面上进行。为了保持系统的稳定性,该模型实现状态反馈控制来跟踪小车的位置。有关方程如何在 Simulink 中推导和实现的说明,请参阅Derive Equations of Motion and Simulate Cart-Pole System (Symbolic Math Toolbox)。
倒立摆动力学
该模型使用封装子系统来实现倒立摆的非线性系统动力学。该子系统确定小车沿 x 轴的位置以及摆绕枢轴点的旋转。

状态反馈控制
该模型实现状态反馈控制以跟踪小车的位置并保持枢轴点低于摆的质心。Kalman filter 用于估计系统的内部状态。
动画和分析
该模型使用一个 Level-2 MATLAB S-Function 模块来实现动画。S-Function 使用 MATLAB® Handle Graphics®。要查看 S-Function,请打开 pendan.m。在摆动画窗口中,使用滑动条在小车上移动摆的枢轴点。为了保持系统稳定性,模型实现基于观测器的状态反馈控制。下图说明倒立摆系统的时域响应。第一个子图显示参考位置与实际小车位置的比较,突出显示随时间变化的跟踪性能。第二个子图描述摆的角位移(以弧度为单位),指示在控制过程中摆角度如何演变。您也可以使用仿真数据检查器来调查记录的信号。


另请参阅
Level-2 MATLAB S-Function | Discrete PID Controller | Signal Generator
主题
- Add App Designer App to Inverted Pendulum Model (Simulink Real-Time)
- Derive Equations of Motion and Simulate Cart-Pole System (Symbolic Math Toolbox)
- 小车倒立摆的控制 (Control System Toolbox)
- Inverted Pendulum Controller Tuning (Simulink Design Optimization)
- 封装基础知识
- 使用信号记录保存信号数据
- Simulink 模型中的单位指定