多体模型结构剖析
多体系统是一组通过关节连接,并通过齿轮等运动学约束进行限定的实体。各种类型的力和扭矩使您能够驱动各种实体,而传感器使您能够感测由此产生的运动。您可以使用 Simscape™ Multibody™ 模块来表示这些组件并分析系统的动态响应。有关多体动态特性仿真的详细信息,请参阅多体动态特性。
基本模型组件
参考 Simscape Multibody 四杆精选示例。您可以通过在 MATLAB® 命令提示符下输入 OpenExample('sm/FourBarExample') 来打开此模型。此模型由通过 Joint 模块互连的实体子系统组成。Joint 模块定义了实体之间可用的自由度。实体子系统通过基础模块图定义实体的实体属性。
四杆模型的基本组件

实体子系统由通过 Rigid Transform 模块互连的 Extruded Solid 模块组成。Extruded Solid 模块提供实体属性,包括几何形状、惯量、颜色和坐标系,即模型中用于对所有位置和方向信息进行编码的轴三元组。Rigid Transform 模块旋转和平移实体,以确保正确的实体装配。
下图显示一个双连杆实体子系统的基础模块图。该图包含三个 Solid 模块,分别表示双连杆的中心部分和远端部分。两个 Rigid Transform 模块将远端实体平移到中心实体两端附近的正确位置。
实体子系统组件

World Frame - 向模型中添加惯量参考坐标系。
Rigid Transform - 进行实体和其他坐标系之间的相对旋转和平移。
Mechanism Configuration - 定义模型中的重力常数。
Solver Configuration - 设置 Simscape 局部求解器选项,例如类型、容差和时间步。这是模型中唯一的必需模块。
模型作动
您可以通过对实体或关节施加力或扭矩来驱动模型。Simscape Multibody 提供了一个 Forces and Torques 库,用于表示作用在实体上的力和扭矩。添加该库中的一个模块,并将其连接到要向其施加力或扭矩的实体坐标系。
| 模块 | 函数 |
|---|---|
| External Force and Torque | 源自多体模型外部的一般力和/或扭矩 |
| Internal Force | 两个任意坐标系之间的通用力对 |
| Spring and Damper Force | 两个任意坐标系之间的弹簧-阻尼器力对 |
| Inverse Square Law Force | 与两个任意坐标系之间距离的平方成反比的力对(例如,库仑静电力) |
| Gravitational Field | 质点对所有实体的引力,该引力随实体到质点本身的距离而变化 |
下图显示了一个四杆模型,其中包含一个 External Force and Torque 模块,用于在曲柄连杆坐标系上规定力和扭矩。

Simscape Multibody 直接在关节模块中提供一系列作动输入,以指定作用于关节的力或扭矩。每个关节基元(关节模块的基本组件)都提供了一系列特定于该基元的作动输入。
关节作动输入可分为两种类型:
运动 - 指定给定关节基元的时变轨迹。
力或扭矩 - 指定作用于给定关节基元的时变作动力或扭矩。
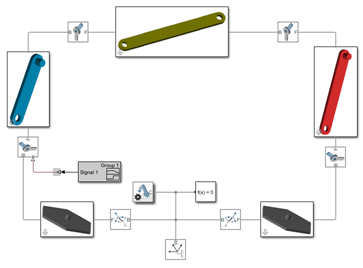
下图显示了一个四杆模型,其中包含一个作用于转动关节的作动扭矩。
动态感测
您可以感测坐标系对组之间的各种动态变量,用于分析或控制设计等目的。感测输出可分为两种类型:
运动 - 计算并输出两个 Simscape Multibody 坐标系之间的相对位置、速度或加速度。您可以通过使用关节模块的感测功能来感测关节坐标系之间的运动,或者通过使用 Transform Sensor 模块来感测任意坐标系之间的运动。
力或扭矩 - 计算并输出作用于两个 Simscape Multibody 坐标系之间的力和扭矩。您可以感测某些 Forces and Torques 模块(例如 Inverse Square Law Force 模块)的端口坐标系之间的力和扭矩,或感测关节模块的端口坐标系之间的力和扭矩。
通过使用关节模块,您可以感测这些模块各自的端口坐标系之间不同类型的力和扭矩,包括:
作用于给定关节基元的作动力或扭矩。
作用于整个关节的约束力和扭矩,用于防止垂直于关节自由度方向的运动。
作用于整个关节的总力和扭矩,包括约束和关节基元作动贡献。
下图显示了一个四杆模型,其中包含一个 Transform Sensor 模块,用于感测耦合器连杆坐标系与世界坐标系之间的轨迹坐标。
![]()