Integrator with Wrapped State (Discrete or Continuous)
Discrete-time or continuous-time integrator with wrapped state
Libraries:
Simscape /
Electrical /
Control /
General Control
Description
The Integrator with Wrapped State (Discrete or Continuous) block implements a wrapped state integrator in conformance with IEEE 421.5-2016[1].
Use this block to generate periodic signals such as angles or to represent a voltage-controlled oscillator. You can switch between continuous and discrete implementations of the integrator using the Sample time parameter.
Equations
To configure the integrator for continuous time, set the Sample
time property to 0. This representation is
equivalent to the continuous transfer function:
From the preceding transfer function, the integrator defining equations are:
where:
u is the integrator input.
x is the integrator state.
y is the integrator output.
t is the simulation time.
x0 is the initial state of the integrator.
To configure the integrator for discrete time, set the Sample
time property to a positive, nonzero value, or to
-1 to inherit the sample time from an upstream block. The
discrete representation is equivalent to the transfer function:
where Ts is the sample time. From the discrete transfer function, the integrator equations are defined using the forward Euler method:
where:
u is the integrator input.
x is the integrator state.
y is the integrator output.
n is the simulation time step.
x0 is the initial state of the integrator.
Defining Initial Conditions
You can define the state initial conditions using Initial condition parameter.
Wrapping Cyclic States
The integrator wraps its state between the specified lower and upper values. This diagram shows the outputs of a wrapped and nonwrapped state integrator for a constant input.
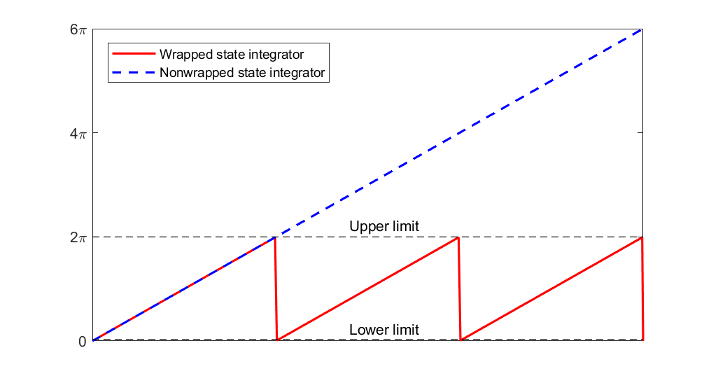
In the diagram, the lower and upper limits are 0 and 2π, respectively.
Examples

Load Side Converter Control
Control the RMS voltage in a load-side converter. The load is provided by a three-phase series RL element. The Control subsystem uses a PI-based cascade control structure with two control loops, an outer voltage control loop and an inner current control loop. The simulation uses step references. The Scopes subsystem contains scopes that allow you to see the simulation results.
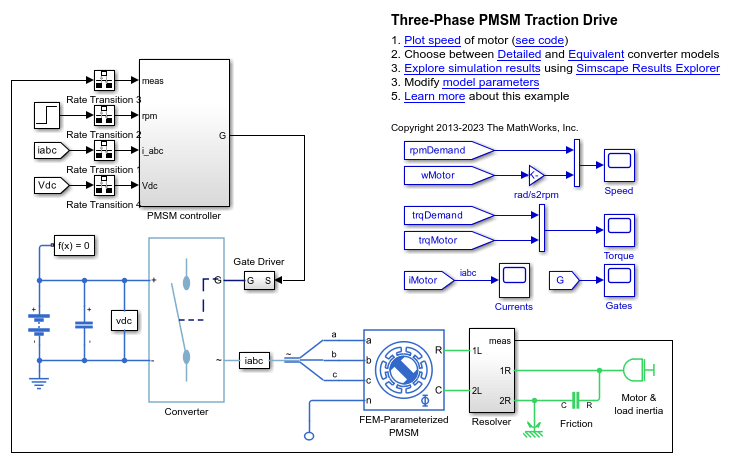
Three-Phase PMSM Traction Drive
Control the rotor speed in a permanent magnet synchronous machine (PMSM) based electrical-traction drive. A high-voltage battery feeds the FEM-Parameterized PMSM block through a controlled three-phase converter. A Rotational Friction block provides the load. The position and speed information are obtained by using a high-fidelity resolver. The PMSM controller subsystem includes a cascade control structure which has an outer speed-control loop and two inner current-control loops. During the 0.25 seconds simulation, the rotor speed demand is ramped-up from 0 to 1000 rpm.
Ports
Input
Output
Parameters
References
[1] IEEE Recommended Practice for Excitation System Models for Power System Stability Studies. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
Extended Capabilities
Version History
Introduced in R2017b