使用 System Composer 工作流仿真移动机器人
与其他工具一起,System Composer™ 可以帮助您整理和链接需求、设计和分配架构模型、分析系统,并在 Simulink® 中实现设计。
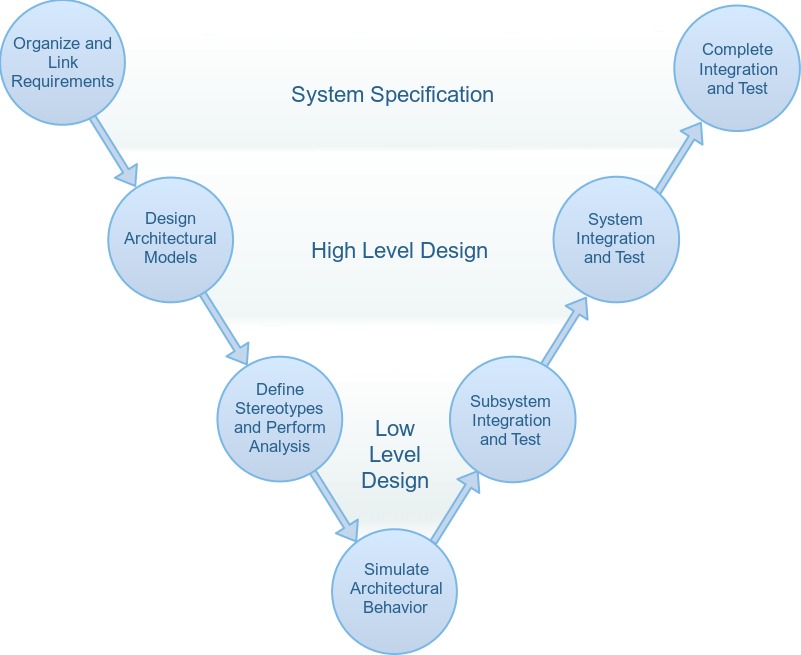
本教程展示了基于模型的系统工程 (MBSE) 流程,涵盖自主移动机器人的早期开发阶段,从规格制定和迭代设计到仿真和验证。在步骤 4 中,机器人绕过路径中的障碍物,满足高级功能需求。
要探索这些系统设计阶段,请点击每个步骤的链接。
步骤 1:组织和链接移动机器人的需求:使用 Requirements Toolbox™ 根据市场调研创建需求和需求链接。将利益相关者的需求与系统需求链接起来。
步骤 2:移动机器人的设计架构和活动图:创建架构模型,帮助组织算法和硬件。使用活动图详细说明机器人的功能流行为。将需求与架构模型中的组件关联起来,然后从活动图将元素分配到逻辑架构,并从一个架构分配到另一个架构。
步骤 3:定义移动机器人的构造型并执行分析:定义构造型并执行系统分析,以确保机器人的耐用组件的使用寿命符合客户规定的平均维修时间。使用基于构造型模型的过滤器来创建架构视图。将物理架构导出到 Web 视图。
步骤 4:移动机器人的架构行为仿真:创建一个 Simulink 模型来仿真移动机器人的真实行为。向逻辑架构模型中的组件添加行为。然后,使用 Simscape™ Multibody™ 仿真逻辑架构。
该工作流由基于模型的系统工程 (MBSE) 设计图的左侧表示。
要开始,请打开此示例的工程。
openProject("scMobileRobotExample");参考
[1] Rahman, Mohd Azizi Abdul, Katsuhiro Mayama, Takahiro Takasu, Akira Yasuda, and Makoto Mizukawa. “Model-Driven Development of Intelligent Mobile Robot Using Systems Modeling Language (SysML).” In Mobile Robots: Control Architectures, Bio-Interfacing, Navigation, Multi Robot Motion Planning and Operator Training, edited by Janusz Będkowski. InTech Open, 2011. https://doi.org/10.5772/26906.