组织和链接移动机器人的需求
使用 System Composer™ 进行基于模型的系统工程 (MBSE) 设计的第一步是设定需求。该功能需要 Requirements Toolbox™ 许可证。
需求是描述系统的期望行为和特征的语句集合。需求确保系统设计的完整性,并且可实现、可验证、明确且相互一致。每个设计层级都应该有适当的需求。这个移动机器人示例有三个需求。
利益相关者需求 - 一组最终用户需求。利益相关者对移动机器人的耐力、载重量、速度、自主性和可靠性等属性非常感兴趣。
系统需求 - 与系统级设计密切相关的一组需求。系统需求包括描述系统如何响应利益相关者需求的衍生需求。
实现需求 - 一组指定模型中子系统的需求。实现需求包括电池、结构、推进、路径生成、位置、控制器以及各个子系统的组件寿命等规格要求。
通过将一组需求与另一组需求链接起来,每个高级需求都可以追溯到实现。随着 MBSE 设计的发展,您可以使用迭代需求分析来增强需求可追溯性和覆盖范围。您可以使用可追溯性图来可视化需求可追溯性。请参阅使用可追溯性图可视化链接 (Requirements Toolbox)。
注意
此示例使用 Simscape™ 模块。如果您没有 Simscape 许可证,则可以打开模型,但只能进行基本更改,例如修改模块参数。
将利益相关者的需求与系统需求链接起来
移动机器人示例包括满足利益相关者需求、系统需求和实现需求的功能、逻辑和物理架构。
1.启动工程。
openProject("scMobileRobotExample");2.将这些系统加载到内存中,以查看其需求链接。
逻辑架构模型
systemcomposer.loadModel("scMobileRobotLogicalArchitecture");物理架构模型
systemcomposer.loadModel("scMobileRobotHardwareArchitecture");3.将这些需求集加载到内存中。
利益相关者需求
slreq.load("scMobileRobotStakeholderNeeds");系统需求
slreq.load("scMobileRobotRequirements");实现需求
slreq.load("scMobileRobotSubsystemRequirements");4.打开需求编辑器 (Requirements Toolbox)。
slreq.editor
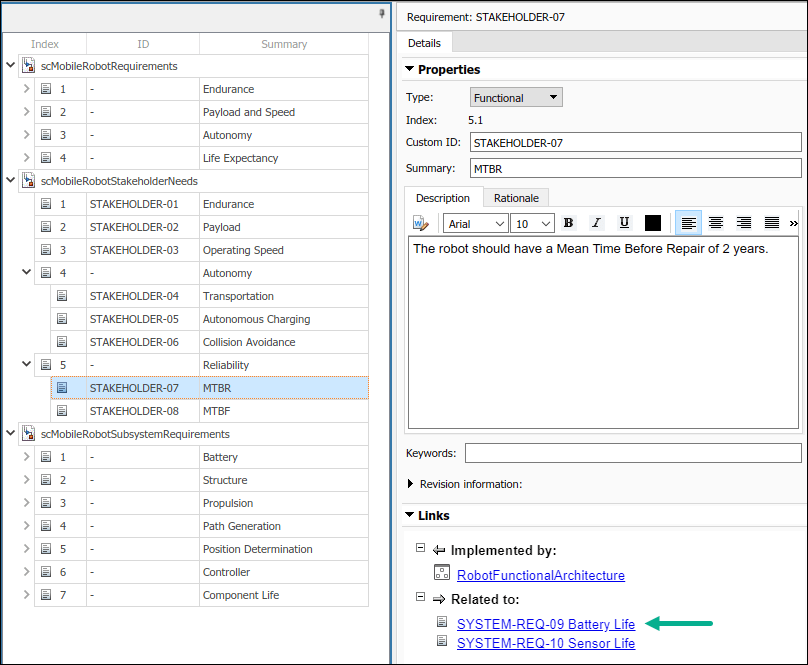
您可以将利益相关者的需求与衍生需求链接起来,以跟踪高级目标。平均修复时间 (MTBR) 需求 STAKEHOLDER-07 由电池寿命需求 SYSTEM-REQ-09 进一步细化。
您可以设置特定的链接类型。要更改链接类型,在 需求编辑器 (Requirements Toolbox) 中,选择显示链接。有关详细信息,请参阅创建和存储链接 (Requirements Toolbox)。
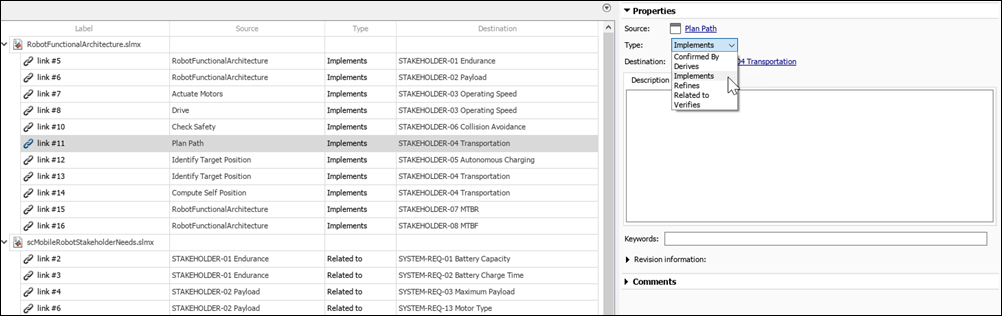
要返回与需求交互,在 需求编辑器 (Requirements Toolbox) 中,选择显示需求。运输利益相关者的需求需求 STAKEHOLDER-04 将由本地化系统需求 SYSTEM-REQ-05 实现。机器人必须能够在指定的误差范围内确定其当前位置。右键点击 SYSTEM-REQ-05,然后选择 Select for Linking with Requirement。然后,右键点击 STAKEHOLDER-04,选择 Create a link from SYSTEM-REQ-05 to STAKEHOLDER-04。
参考
[1] Rahman, Mohd Azizi Abdul, Katsuhiro Mayama, Takahiro Takasu, Akira Yasuda, and Makoto Mizukawa. “Model-Driven Development of Intelligent Mobile Robot Using Systems Modeling Language (SysML).” In Mobile Robots: Control Architectures, Bio-Interfacing, Navigation, Multi Robot Motion Planning and Operator Training, edited by Janusz Będkowski. InTech Open, 2011. https://doi.org/10.5772/26906.
另请参阅
App
函数
slreq.editor(Requirements Toolbox) |slreq.load(Requirements Toolbox) |systemcomposer.loadModel