C28x CAN Receive
增强型控制器局域网接收邮箱
库:
C2000 Microcontroller Blockset /
C2803x
C2000 Microcontroller Blockset /
C2805x
C2000 Microcontroller Blockset /
C2806x
C2000 Microcontroller Blockset /
C280x
C2000 Microcontroller Blockset /
C281x
C2000 Microcontroller Blockset /
C2833x
C2000 Microcontroller Blockset /
C2834x
C2000 Microcontroller Blockset /
F280013x
C2000 Microcontroller Blockset /
F280015x
C2000 Microcontroller Blockset /
F28002x
C2000 Microcontroller Blockset /
F28003x
C2000 Microcontroller Blockset /
F28004x
C2000 Microcontroller Blockset /
F2807x
C2000 Microcontroller Blockset /
F2837xD
C2000 Microcontroller Blockset /
F2837xS
C2000 Microcontroller Blockset /
F2838x /
C28x
C2000 Microcontroller Blockset /
F28p65x
描述
CAN Receive 模块生成源代码,用于通过 CAN 邮箱接收增强型控制器局域网 (CAN) 消息。处理器上的 CAN 模块提供串行通信功能,并有 32 个可配置为接收或发送的邮箱。该模块支持标准格式或扩展格式的 CAN 数据帧。
该模块支持 CAN 或 DCAN,具体取决于 C2000 处理器的类型。
要将 CAN Receive 模块与 CAN Pack 模块一起使用,请在 canmsglib 库中将数据类型设置为 CAN_MESSAGE_TYPE。
通过导航至 硬件实现 > Target hardware resources,为特定硬件板配置 CAN 模块。请确认这些设置符合您的应用程序要求。
示例

使用 CAN 模块进行通信
本示例展示了如何使用 CAN 模块在目标硬件和主机之间建立 CAN 通信,以支持 Texas Instruments™ C2000™ Microcontroller Blockset。
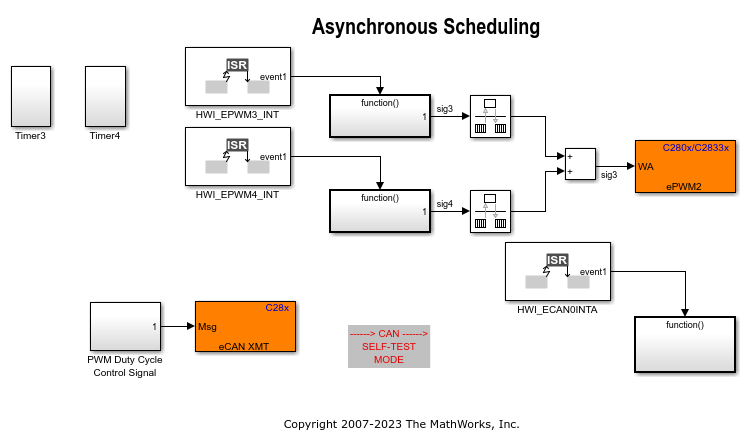
异步调度
本示例展示了如何使用 Texas Instruments™ C28x™ 外设和 Hardware Interrupt 模块以异步方式控制 Simulink® 函数调用子系统的实时执行。