bundleAdjustmentStructure
Refine 3-D points using structure-only bundle adjustment
Syntax
Description
xyzRefinedPoints = bundleAdjustmentStructure(xyzPoints,pointTracks,cameraPoses,intrinsics)
The structure-only refinement procedure is a special case of bundle adjustment with camera poses fixed during optimization. The 3-D points and the camera poses are placed in the same world coordinate system.
[
refines 3-D points from the world point set, wpSetRefined,vSetRefined,pointIndex] = bundleAdjustmentStructure(wpSet,vSet,viewID,intrinsics)wpSet, and refines camera
poses from the image view set, vSet. viewID
specifies the IDs if the views in vSet.
[
additionally returns an N-element vector containing the mean reprojection
error for each 3-D world point using the arguments from the previous syntax.xyzRefinedPoints,reprojectionErrors]
= bundleAdjustmentStructure(___)
[___] = bundleAdjustmentStructure(___,
uses additional options specified by one or more name-value arguments. Unspecified arguments
have default values.Name,Value)
Examples
Load data for initialization.
data = load('globeBA.mat');Refine the 3-D world points.
xyzRefinedPoints = bundleAdjustmentStructure(data.xyzPoints,data.pointTracks,data.cameraPoses,data.intrinsics);
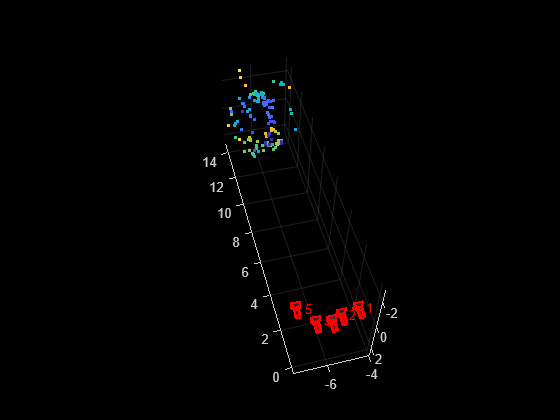
Display the refined 3-D world points.
pcshow(xyzRefinedPoints,AxesVisibility="on",VerticalAxis="y",VerticalAxisDir="down",MarkerSize=45);
Display the cameras.
hold on plotCamera(data.cameraPoses,Size=0.2); hold off grid on
Input Arguments
Name-Value Arguments
Output Arguments
3-D locations of refined world points, returned as an M-by-3 matrix of [x,y, z] locations.
Data Types: single | double
Refined 3-D world points, returned as a worldpointset
object.
Refined camera poses, returned as a imageviewset
object.
Indices to wpSetRefined of refined 3-D world points, returned
as an M-element array.
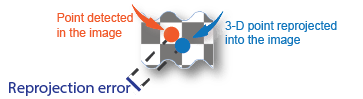
Reprojection errors, returned as an M-element vector. The
function projects each world point back into each camera. Then in each image, the
function calculates the reprojection error as the distance between the detected and the
reprojected point. The reprojectionErrors vector contains the
average reprojection error for each world point.
References
[1]
[2]
[3]