estimateStereoRectification
Description
[
returns projective transformations for rectifying stereo images. This function does not
require intrinsic or extrinsic camera parameters.tform1,tform2]
= estimateStereoRectification(F,inlierPoints1,inlierPoints2,imageSize)
Examples
Load the stereo images and feature points which are already matched.
I1 = imread("yellowstone_left.png"); I2 = imread("yellowstone_right.png"); load yellowstone_inlier_points;
Display point correspondences. Notice that the matching points are in different rows, indicating that the stereo pair is not rectified.
showMatchedFeatures(I1,I2,inlier_points1,inlier_points2,"montage"); title("Original Images and Matching Feature Points");

Calculate the fundamental matrix from the corresponding points.
f = estimateFundamentalMatrix(inlier_points1,inlier_points2, ... "Method","Norm8Point");
Calculate the rectification transformations.
[tform1,tform2] = estimateStereoRectification(f,inlier_points1,...
inlier_points2,size(I2));Rectify the stereo images using projective transformations tform1 and tform2.
[I1Rect,I2Rect] = rectifyStereoImages(I1,I2,tform1,tform2);
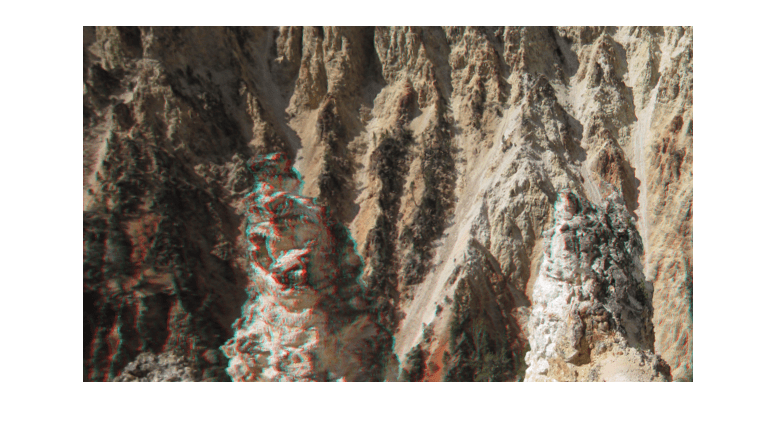
Display the stereo anaglyph, which can also be viewed with 3-D glasses.
figure imshow(stereoAnaglyph(I1Rect,I2Rect))
Input Arguments
Output Arguments
Tips
Applying the output uncalibrated rectification of
tform1(ortform2) to image 1 (or image 2) can result in an undesired distortion if an epipole exists within the image. You can check for an epipole within an image by applying theisEpipoleInImagefunction.
References
[1]
[2] Pollefeys, M., Koch, R., and Van Gool, L.. A Simple and Efficient Rectification Method for General Motion. Proceedings of the Seventh IEEE International Conference on Computer Vision. Volume 1, pages 496-501. 1999. DOI:10.1109/ICCV.1999.791262.