pcfromdepth
Syntax
Description
ptCloud = pcfromdepth(depthImage,depthScaleFactor,intrinsics)depthScaleFactor, normally provided by the RGB-D camera manufacturer
specifies a division factor for the depth image.
This function applies only for RGB-D cameras.
ptCloud = pcfromdepth(___,Name=Value)pcfromdepth(depthImage,depthScaleFactor,intrinsics,DepthRange=[0,Inf])
sets the depth range to the 2-element vector value of [0,Inf].
Examples
Read and display the depth image taken from an RGB-D camera.
depthImage = imread("sampleDepth.png");
imshow(depthImage)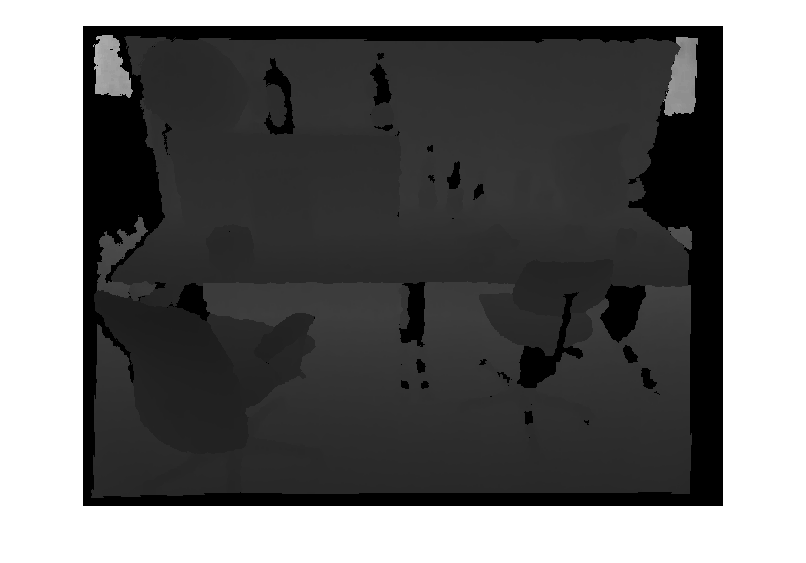
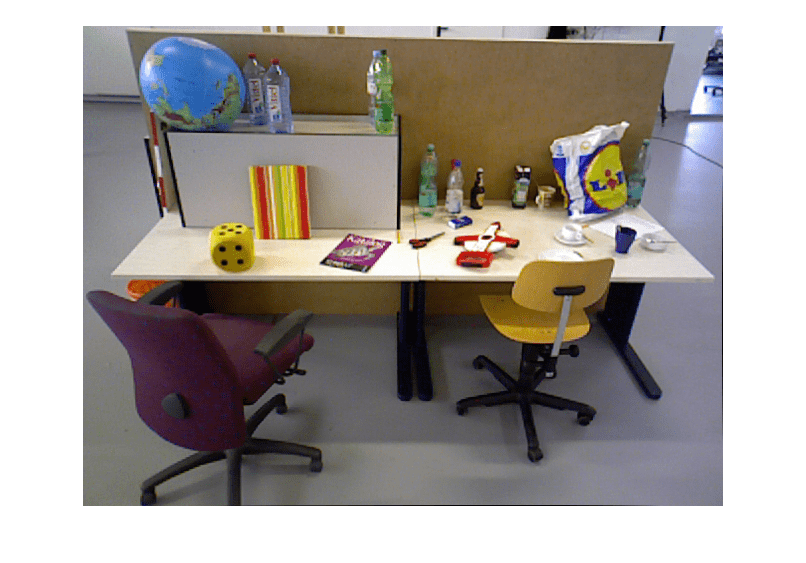
Read and display the color image that corresponds to the depth image.
colorImage = imread("sampleImage.png"); imshow("sampleImage.png")
Create a cameraIntrinsics object to store the camera intrinsics parameters. The focal length, principal point, and image size are in units of pixels. The maximum camera depth is in meters.
focalLength = [535.4, 539.2]; principalPoint = [320.1, 247.6]; imageSize = size(depthImage,[1,2]); intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize); depthScaleFactor = 5e3; maxCameraDepth = 5;
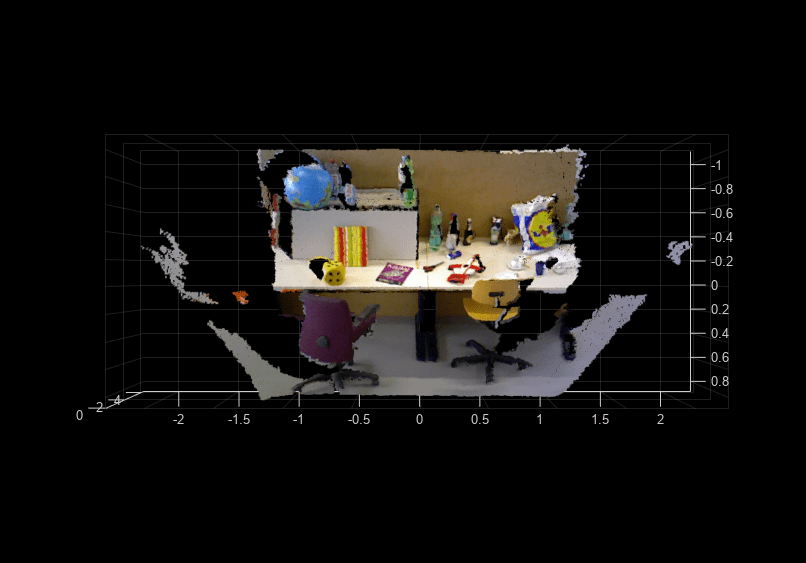
Convert depth map into world points, converting all points into point cloud.
ptCloud = pcfromdepth(depthImage,depthScaleFactor, intrinsics, ... ColorImage=colorImage, ... DepthRange=[0 maxCameraDepth]);
Display the resulting point cloud.
pcshow(ptCloud, VerticalAxis="Y", VerticalAxisDir="Up", ViewPlane="YX");
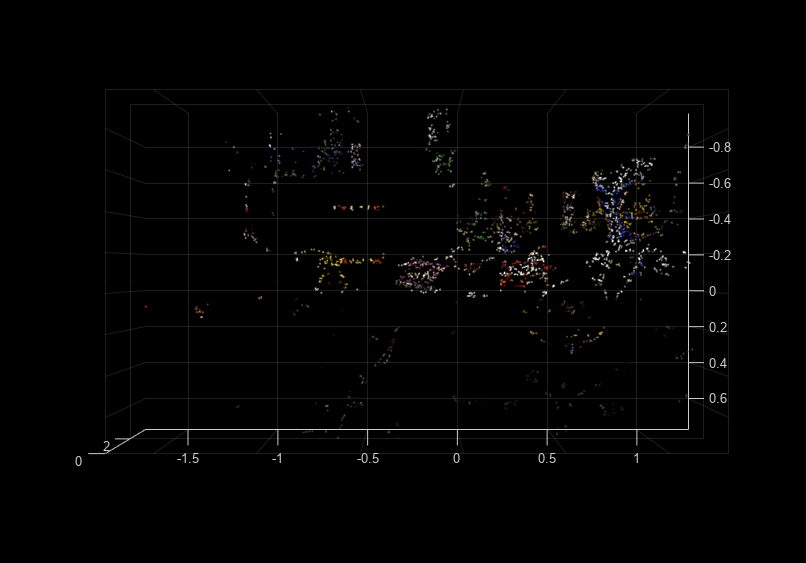
Detect and extract ORB features from the color image.
imagePoints = detectORBFeatures(im2gray(colorImage));
Convert depth map into world points, converting only feature points into point cloud.
ptCloud = pcfromdepth(depthImage,depthScaleFactor, intrinsics, ... ColorImage=colorImage, ... ImagePoints=imagePoints, ... DepthRange=[0 maxCameraDepth]);
Display the resulting point cloud.
pcshow(ptCloud, VerticalAxis="Y", VerticalAxisDir="Up", ViewPlane="YX");
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] The TUM data set is provided by J. Sturm, N. Engelhard, F. Endres, W. Burgard and D. Cremers under the CC-BY-4.0 license license. All warranties and representations are disclaimed; see the license for details. MathWorks® modified the name of the RGB-D SLAM Dataset and Benchmark dataset to use in the example.
Extended Capabilities
Version History
Introduced in R2022b