LDPC Encoder
Libraries:
Wireless HDL Toolbox /
Error Detection and Correction
Description
The LDPC Encoder block implements a quasi-cyclic low-density parity-check (QC-LDPC) encoder with hardware-friendly control signals. The block accepts data bits and a stream of control signals and outputs encoded bits, a stream of control signals, and a signal that indicates whether the block is ready to accept new inputs.
The block supports scalar inputs and vector inputs with a specified parity-check matrix and block size. The block also supports lower-triangular or upper-triangular, dual-diagonal, and mixed-diagonal parity-check matrices. The block supports LDPC codes of circulant weight 1. For more information, see Parity-Check Matrix.
You can use this block to develop a standard-based or generalized transmitter that uses a QC-LDPC for forward error correction (FEC) coding. The block provides an architecture suitable for HDL code generation and hardware deployment. See Algorithms.
Examples

Encode Data with Quasi-Cyclic Low Density Parity Check Code
Encode data bits with quasi-cyclic low-density parity-check codes.

LDPC Encode and Decode of Streaming Data
Use LDPC Encoder and LDPC Decoder blocks and verify their functionality.
Ports
Input
Output
Parameters
More About
QC-LDPC codes are an important class of codes within the family of LDPC codes. You can use LDPC codes in many applications because of their simple encoding implementation of using cyclic shift registers. The LDPC Encoder block performs encoding using a parity-check matrix.
The block supports matrices with a circulant weight of 1. Each element in the parity-check matrix corresponds to a submatrix of size Z. The elements in the parity-check matrix must be in the range [–1, Z –1], where Z is the block size. In a parity-check matrix, –1 corresponds to a zero submatrix, 0 corresponds to an identity submatrix, 1 corresponds to an identity submatrix circularly shifted by one time, and n corresponds a submatrix circularly shifted by n times, where n is any value in the range [0, Z – 1].
This figure shows a parity-check matrix of size 2-by-4 whose block size is 4.

In this parity-check matrix:
–1represents a zero submatrix, [0 0 0 0; 0 0 0 0; 0 0 0 0; 0 0 0 0].0represents an identity submatrix, [1 0 0 0; 0 1 0 0; 0 0 1 0; 0 0 0 1].1represents an identity submatrix circularly shifted by one time, [0 1 0 0; 0 0 1 0; 0 0 0 1;1 0 0 0].2represents an identity submatrix circularly shifted by two times, [0 0 1 0; 0 0 0 1; 1 0 0 0; 0 1 0 0].3represents an identity submatrix circularly shifted by three times, [0 0 0 1; 1 0 0 0; 0 1 0 0; 0 0 1 0].
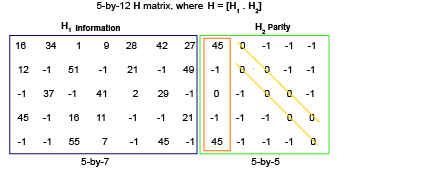
The parity-check matrix, H can be partitioned into two sub-matrices H1 and H2.
H = [H1 H2], where H1 is the information part of size M x (N – M) and H2 is the parity part of size M-by-M.
For example, in a parity-check matrix of size 5-by-12, the 5-by-7 submatrix H1 comprises the information part and the 5-by-5 submatrix H2 comprises the parity part, as this figure shows.

The LDPC Encoder block supports these types of parity-check matrix.
Lower-triangular — Contains –1s in the upper triangle of the parity part. These matrices are used in the IEEE 802.11ad and DOCSIS 3.1 cable communication standards.

Double-diagonal — Contains three nonzero elements in the first column of the parity part. Also, when you expand each element with an identity matrix of the block size, the sum over (GF2) of these elements must be an identity matrix, which means that at least two elements are the same. The remaining columns of the parity part must contain a bidiagonal pattern with 0s in its diagonals, and –1s in the rest of the parity part. These matrices are used in the Wi-Fi®, worldwide interoperability for microwave access (WiMAX), and wireless regional area network (WRAN) codes communication standards.
Mix of double-diagonal followed by a single-diagonal lower triangular — Contains a double-diagonal matrix with the extended rows and columns as a lower triangular part with 0s on the diagonals, and –1s in the rest of the parity part. These matrices are used in the 5G NR communication standard.

Upper-triangular — Contains –1s in the lower triangle of the parity part. These matrices are used in custom communications.

Algorithms
This figure shows the architecture block diagram of the LDPC Encoder block.
The Input Controller block reads and writes input data to the Input RAM block and enables the encoding after writing the entire frame to input RAM. The Parity-check matrix block consists of specified parity-check matrix values and provides shift values to the Shifter block. The Alpha RAM block stores the shifted output. The Parity Controller block calculates parity bit sequences and stores them in the Parity RAM block. The Mux block multiplexes and serializes the bits from the Input RAM and Parity RAM blocks.

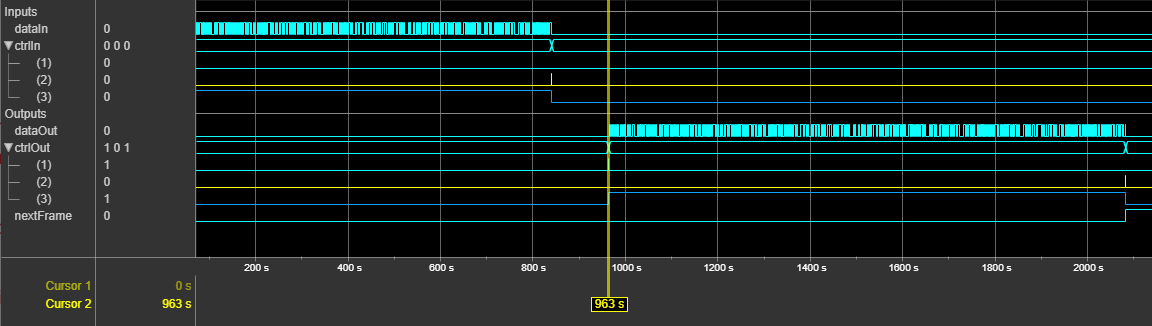
The latency of the block varies with the Parity-check matrix parameter and the type of input. Because the latency varies, use the nextFrame control signal output port to determine when the block is ready for a new input frame.
This figure shows a sample output and latency of the LDPC Encoder block for a scalar input when you use default settings for the block parameters. The latency of the block is 963 clock cycles.