Entwicklung von Robotern für Pick-and-Place-Anwendungen mit MATLAB & Simulink
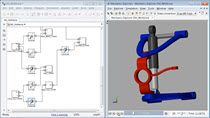
In diesem Webinar erfahren Sie, wie Sie Roboter als kinematische Ketten mit starren Körpern mit Hilfe der Robotics System Toolbox abbilden können. Sie können eigene Strukturen modellieren und diese mit weiteren Körpern und Gelenken ausstatten sowie Gelenkgrenzen festlegen. Die so definierte Roboterkonfiguration dient u.a. Basis zur Berechnung der Vorwärtskinematik sowei für Transformationen zwischen lokalen Koordinatensystemen und der geometrischen Jacobi-Matrix.
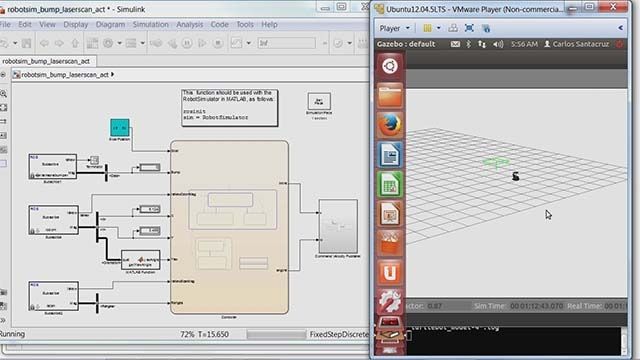
Damit können Sie nun Pick & Place-Probleme mit einem Roboter-Manipulator entwickeln. In einer virtuellen Umgebung wird dafür zunächst ein Objekt mit einer 3D-Kamera erkannt und lokalisiert. Mit Hilfe von Inverskinematik und Bahnplanung wird eine Trajektorie zum Ziel berechnet. Die Bewegung wird anschließend mit einem physikalischen Modell des Roboters simuliert. Diese Vorgehensweise ermöglicht es Ihnen, virtuell unterschiedliche Szenarien schnell und einfach zu evaluieren und dann sicher auf echte Systeme anzuwenden.
Flash-Nutzer: Zur Anzeige des Inhaltsverzeichnisses mit der Maus über das Video fahren.
Aufgezeichnet: 14 Dez 2016
Ausgewähltes Produkt